What Is PID Control? | Understanding PID Control, Part 1
Summary
TLDRThis video introduces the concept of PID control, breaking down the key elements—Proportional, Integral, and Derivative components—without heavy math. It uses intuitive examples like walking to a goal and controlling a drone’s altitude to explain how PID controllers adjust a system’s behavior. The video highlights how PID controllers work in real-world applications, such as drone stabilization, and the importance of tuning each component for effective control. Viewers learn how feedback from the present, past, and future errors is combined to achieve accurate control in various systems, making PID one of the most widely used methods in engineering.
Takeaways
- 😀 PID control is a widely-used feedback control system that adjusts inputs to achieve desired outputs in various systems.
- 😀 The key components of a PID controller are Proportional (P), Integral (I), and Derivative (D) actions, each addressing different aspects of system error.
- 😀 Proportional control adjusts the system's input based on the current error but can lead to steady-state errors when approaching the target.
- 😀 Integral control adds a memory of past errors, helping to eliminate steady-state error and drive the system to its goal.
- 😀 Derivative control anticipates future error by measuring the rate of change of the error, preventing overshooting and improving system stability.
- 😀 In a PID controller, the three components (P, I, and D) work together to correct the error dynamically and achieve smooth control.
- 😀 Proportional control works well in simple systems like walking toward a goal, but struggles with systems that require precise hover or balance, like a drone.
- 😀 A proportional-only controller can cause a system, like a drone, to hover at a suboptimal altitude due to the presence of steady-state error.
- 😀 By integrating the past errors, the proportional-integral (PI) controller can correct the drone's altitude, eliminating steady-state error.
- 😀 Tuning the PID controller involves adjusting the gain of each component to weigh their contributions, optimizing the system's response.
- 😀 PID controllers are fundamental in many real-world applications due to their ability to balance current, past, and future error, making them versatile and easy to implement.
Q & A
What is the primary role of a control engineer?
-The primary role of a control engineer is to design and implement systems that generate the appropriate actuated signals (inputs) to ensure that a system produces the desired controlled output, minimizing error between the actual output and the command or setpoint.
What is the error term in a feedback control system?
-The error term is the difference between the system's actual output and the desired output (command or setpoint). If the output matches the desired value, the error becomes zero, which is the goal in feedback control systems.
How does a proportional controller work in simple terms?
-A proportional controller adjusts the system’s input based on the current error. The larger the error, the stronger the response. The controller multiplies the error by a gain factor to determine the input that should reduce the error over time.
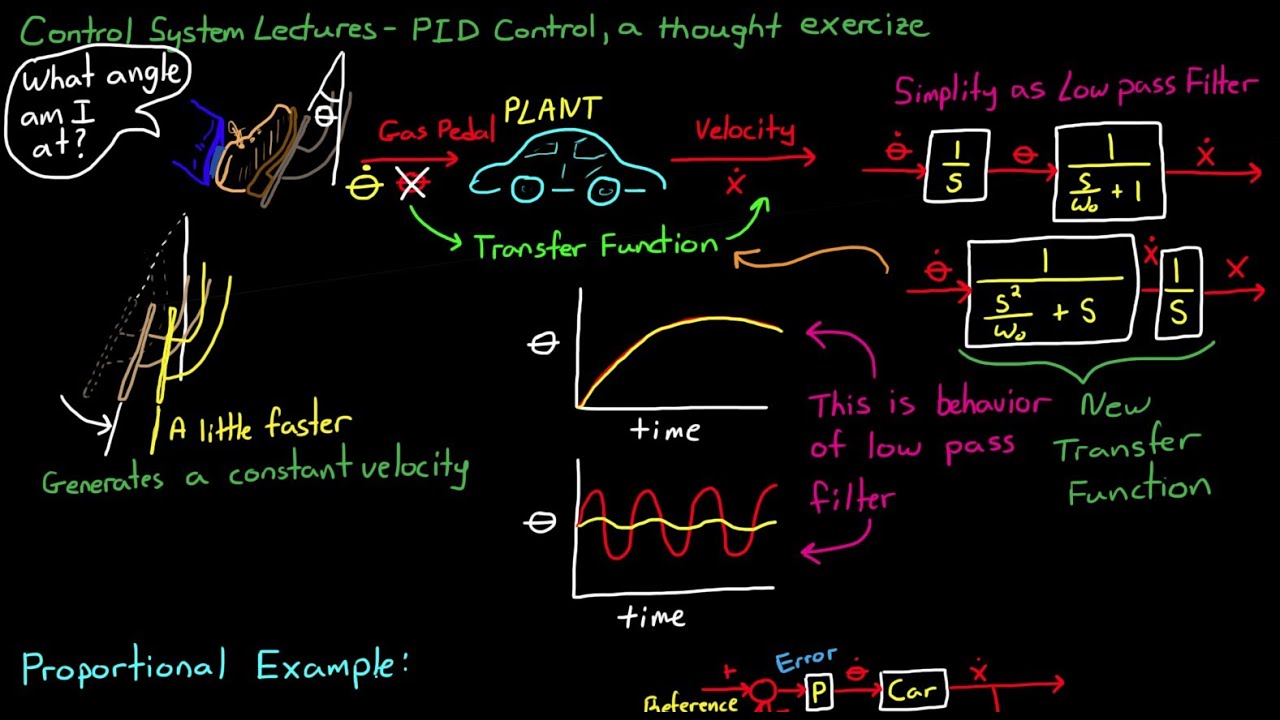
Why does a proportional controller work well in the walking example but not for the drone example?
-In the walking example, a proportional controller reduces the error steadily until it reaches zero, which is a smooth and stable process. However, in the drone example, a proportional controller alone leads to steady-state error, causing the drone to hover below the desired altitude because it doesn't account for past errors or the system's dynamics.
What is steady-state error, and how does it manifest in the drone example?
-Steady-state error occurs when the system, such as the drone, stabilizes at a point where the error never fully reaches zero. In the drone example, using just a proportional controller causes the drone to hover at an altitude that is slightly off from the desired 50 meters, creating a persistent error that does not disappear.
How does adding an integrator to the controller help resolve steady-state error?
-The integrator adds a memory component to the controller by summing the past errors over time. As long as there is a persistent error, the integrator keeps accumulating it, which forces the system to adjust its input, eliminating the steady-state error and driving the output to the desired value.
What is the main drawback of using a proportional-integral controller?
-A major drawback of the proportional-integral (PI) controller is that it can cause overshooting. As the integrator continually adjusts based on past errors, the system might exceed the desired target before correcting itself, leading to oscillations or instability.
How does the derivative term in a PID controller improve system performance?
-The derivative term predicts the future behavior of the error by calculating its rate of change. It helps anticipate how fast the error is approaching zero or growing, allowing the controller to adjust the system's input proactively, preventing overshooting and improving stability.
What is the advantage of using a PID controller over a simpler PI or P controller?
-A PID controller offers a more comprehensive solution by considering the present error (P), accumulated past errors (I), and the rate of change of the error (D). This combination makes it more effective in handling a wide variety of control challenges, leading to smoother and faster convergence to the desired output.
How does tuning a PID controller affect its performance?
-Tuning a PID controller involves adjusting the gain values for the proportional, integral, and derivative components to achieve the desired system behavior. Proper tuning can lead to faster response times, reduced overshoot, and minimal steady-state error. Incorrect tuning can result in instability or slow performance.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenant



5.0 / 5 (0 votes)
