13 PSK Kontroller Pid Tuning Gain 1
Summary
TLDRThis video explains the fundamentals of PID controllers, covering key topics such as their definition, structure, and various setting techniques. The presenter discusses the proportional (P), integral (I), and derivative (D) components, demonstrating how they combine in PID control to impact system responses. The script delves into methods like the Ziegler-Nichols oscillation method for tuning PID parameters, offering practical steps for setting control gains and analyzing system behavior. The overall aim is to equip students with the knowledge to understand, analyze, and apply PID control systems effectively in various engineering contexts.
Takeaways
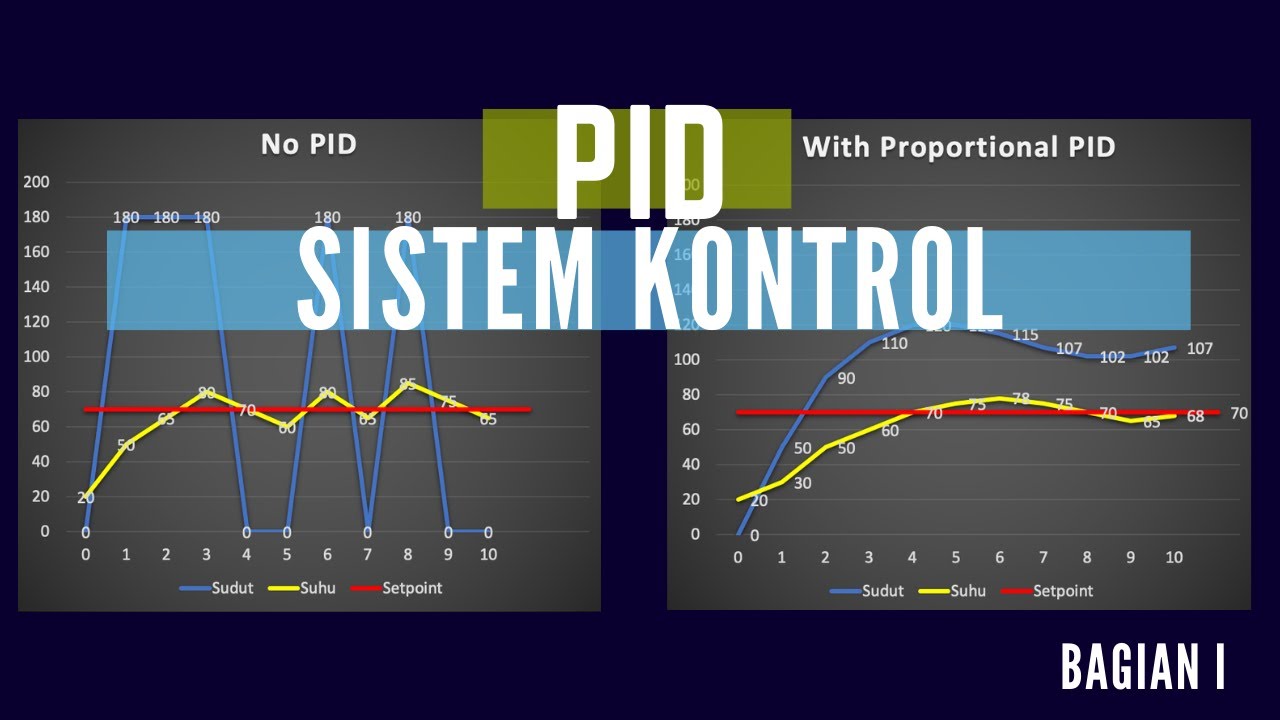
- 😀 The main objective of the material is to explain PID control, including its definition, structure, setting techniques, and how parameters affect system response.
- 😀 PID stands for Proportional, Integral, and Derivative, where each part (P, I, D) contributes to the control system's output.
- 😀 The structure of the PID control system can be visualized as a block diagram with components like k3s for the derivative, k2/s for the integral, and k1 for proportional.
- 😀 The PID control can be configured in different forms, including series (PID, PD, PI) and parallel forms.
- 😀 The Ziegler-Nichols method is introduced as a technique for setting PID controller parameters, specifically using oscillation and reaction curves.
- 😀 To apply the Ziegler-Nichols method, the system must first be stable, and the gain is gradually increased until the system starts to oscillate.
- 😀 The critical gain (KC) is determined when the system reaches a full oscillation, and this value is then used to calculate the PID controller parameters.
- 😀 The period of oscillation (PC) is calculated based on the time between peaks and valleys in the output waveform, helping in further tuning the controller.
- 😀 The script also explains the relationship between gain values and system stability, highlighting how different gains lead to stable or unstable oscillations.
- 😀 After determining the gain and period, the PID parameters (Kp, Ki, Kd) are calculated using specific formulas based on the Ziegler-Nichols method.
- 😀 The script concludes with a problem-solving task, where students are asked to apply the described method to a model and determine PID parameters through the process.
Q & A
What is the primary purpose of PID controllers?
-The primary purpose of PID controllers is to regulate a system's output by adjusting the control inputs based on proportional, integral, and derivative components, aiming to minimize the error between the desired and actual system output.
What are the three main components of a PID controller?
-The three main components of a PID controller are: Proportional (P), Integral (I), and Derivative (D). These components work together to control a system's output.
What is the Ziegler-Nichols method, and why is it important in tuning PID controllers?
-The Ziegler-Nichols method is a popular tuning technique for PID controllers, used to determine the optimal PID parameters. It involves increasing the gain until the system starts oscillating, then using the critical gain and oscillation period to calculate the PID settings.
How do you determine the critical gain (KC) using the Ziegler-Nichols method?
-To determine the critical gain (KC), you start with a small gain and gradually increase it until the system oscillates continuously. The value of KC is the gain at which these oscillations occur.
What does the oscillation period (PC) represent in the Ziegler-Nichols method?
-The oscillation period (PC) represents the time it takes for one complete cycle of oscillation in the control system. It is used in the Ziegler-Nichols method to calculate the PID controller parameters.
What are the different forms of PID controllers mentioned in the script?
-The script mentions several forms of PID controllers: Proportional (P), Proportional-Integral (PI), Proportional-Derivative (PD), and Proportional-Integral-Derivative (PID). Each form combines different elements of the PID components.
What is the difference between series and parallel PID controller forms?
-In the series form of a PID controller, the P, I, and D components are combined in sequence. In the parallel form, each component is treated separately and added together to form the control output.
What are the steps for the Ziegler-Nichols oscillation method as described in the script?
-The steps for the Ziegler-Nichols oscillation method are: (1) Set a small gain value, (2) Increase the gain until the system oscillates, (3) Measure the oscillation period (PC), and (4) Use the Ziegler-Nichols table to calculate the PID controller parameters based on the critical gain (KC) and period (PC).
How do you identify whether the system is stable or unstable using the Ziegler-Nichols method?
-You identify system stability by observing the oscillations. If the oscillation amplitude increases over time, the system is unstable. If the oscillation remains constant or diminishes, the system is stable.
What is the significance of the gain margin and period in the PID controller tuning process?
-The gain margin and period are critical for determining the correct PID controller settings. The gain margin (KC) is the gain value at which oscillations occur, and the period (PC) is the time between two consecutive peaks or valleys of the oscillation. These values are used to calculate the optimal PID parameters.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video

What is a PID Controller? | DigiKey
Pengenalan Sistem Kontrol PID Bagian 1

कंप्यूटर क्या होता है? | Computer के प्रकार | Input और Output Device Part of Computer ki Generation

Important PID Concepts | Understanding PID Control, Part 7
What Is PID Control? | Understanding PID Control, Part 1
UJAR SISTEM INFORMASI MANAJEMEN PERTEMUAN 1 GAMBARAN UMUM SISTEM INFORMASI MANAJEMEN
5.0 / 5 (0 votes)