Sistema de suspensión con multiples elementos de fricción
Summary
TLDREl vídeo explica un modelo matemático para un sistema con múltiples elementos de fricción y dos masas conectadas por resortes. Se definen fuerzas de fricción y una fuerza externa aplicada a una masa. Se establece un análisis unidimensional y se crean diagramas de cuerpo libre para ambas masas. Se derivan ecuaciones diferenciales que describen la dinámica del sistema, considerando la interacción entre las masas y los efectos de los resortes y amortiguadores.
Takeaways
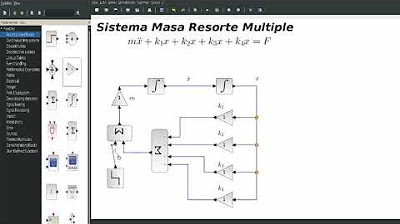
- 📊 El vídeo presenta un modelo matemático de un sistema con múltiples elementos de fricción y dos masas interconectadas por un resorte.
- 🧱 Se definen los elementos de fricción y se nombran los resortes y amortiguadores que interconectan las masas.
- 💨 Se asume la existencia de una fuerza externa aplicada a la masa 2 que causa la dinámica del sistema, y el análisis se realiza en un solo eje unidimensional.
- 🗺️ Se establecen los referenciales para el análisis del movimiento y se elige que la dirección hacia la izquierda sea positiva.
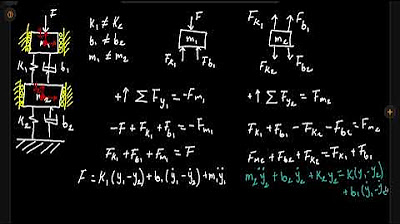
- 📐 Se generan los diagramas de cuerpo libre para las masas m1 y m2, indicando todas las fuerzas y fricciones actuando sobre cada masa.
- ⚖️ Para m2, las fuerzas de oposición incluyen fricciones, resortes, y amortiguadores que se colocan en el lado opuesto de la fuerza de excitación.
- 📝 Se plantean las ecuaciones diferenciales que describen la dinámica del sistema, comenzando con una sumatoria de fuerzas en los referenciales establecidos.
- 🔄 La ecuación de la masa 2 se simplifica a través de la factorización, obteniendo términos de posición, velocidad y amortiguamiento.
- 🔢 Se realiza un procedimiento similar para m1, considerando las fuerzas de los resortes y amortiguadores y obteniendo una ecuación diferencial.
- 🔗 Las ecuaciones resultantes están interconectadas a través de la fuerza generada por el resorte k2, que afecta a ambas masas.
Q & A
¿Qué elementos principales componen el sistema descrito en el vídeo?
-El sistema consta de dos masas interconectadas por un resorte, con fricción en la parte superior e inferior, y una fuerza externa aplicada a la masa 2.
¿Cuál es el objetivo del modelo matemático presentado?
-El objetivo es encontrar las ecuaciones matemáticas que describen el movimiento de un sistema con fricción y masas interconectadas, considerando una fuerza externa aplicada.
¿En qué dirección se considera que ocurre el movimiento del sistema?
-El movimiento se considera unidimensional, ocurriendo únicamente en un eje horizontal.
¿Cómo se describen las fuerzas de fricción en el sistema?
-Las fuerzas de fricción son descritas como elementos de oposición que se oponen al movimiento tanto de las masas como de los amortiguadores.
¿Qué fuerzas actúan sobre la masa 2?
-La masa 2 experimenta una fuerza de excitación hacia la derecha, la oposición del resorte k2 y k3, el amortiguador d2, y las fuerzas de fricción d5 y d6, todas actuando en diferentes direcciones.
¿Cómo se genera el diagrama de cuerpo libre para la masa 1?
-El diagrama de cuerpo libre para la masa 1 incluye la interacción indirecta con la fuerza externa a través del resorte k2, la oposición de los resortes k1 y k3, y la resistencia de los amortiguadores d1 y d4.
¿Qué se describe con las ecuaciones diferenciales obtenidas?
-Las ecuaciones diferenciales describen la dinámica del movimiento de las masas 1 y 2, tomando en cuenta las fuerzas externas, los resortes, los amortiguadores y las fricciones.
¿Qué rol juega el resorte k2 en la interacción entre las dos masas?
-El resorte k2 genera una fuerza que conecta las dos masas, afectando sus movimientos y siendo un elemento clave en la interacción entre ambas.
¿Cómo se simplifican las ecuaciones de movimiento para mejorar su claridad?
-Las ecuaciones se simplifican mediante factorización de términos comunes, agrupando elementos relacionados con la velocidad y la posición de las masas.
¿Qué suposiciones se hacen sobre la naturaleza de la fuerza externa aplicada?
-Se considera que la fuerza externa puede ser de tipo escalón, rampa, impulso, o una combinación de todas, y su naturaleza no se define completamente en el vídeo.
Outlines

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenMindmap

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenKeywords

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenHighlights

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenTranscripts

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführen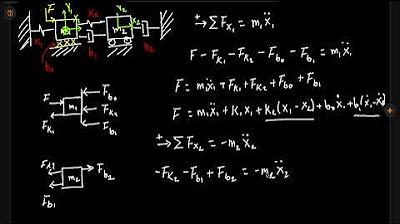



5.0 / 5 (0 votes)
