robot6
Summary
TLDREn este vídeo, se explica cómo programar un robot para que siga una secuencia de movimientos automáticos. Se comienza asignando puntos de referencia al robot, moviendo sus articulaciones a distintas posiciones y registrando cada una como un punto. Luego, se crea un programa que le instruye al robot para que realice una serie de movimientos siguiendo los puntos grabados. El objetivo es que el robot retrace la ruta marcada, ejecutando una secuencia de acciones desde el inicio hasta el final, y regresar al punto de partida.
Takeaways
- 🤖 El video trata sobre cómo programar un robot para que siga un conjunto de movimientos automáticos.
- 📍 Se necesita establecer puntos previamente para que el robot los siga de manera automática.
- 🔢 Se menciona la necesidad de grabar puntos específicos para que el robot los memorice y los siga.
- 📱 Se describe el proceso de asignar puntos al mover diferentes partes del robot, como la cintura, hombro, codo, etc.
- ✅ Se utiliza un botón 'registrar' para grabar los puntos clave que el robot debe seguir.
- 🔄 Se demuestra cómo se graban los puntos A, B, C, D, etc., mientras se mueve el robot a distintas posiciones.
- 🔧 Se abordan movimientos adicionales como mover la pinza, cerrarla y abrirla, y grabar puntos asociados.
- 🔄 Se sugiere que después de grabar los puntos, se debe crear un programa para que el robot siga la secuencia de puntos.
- 🔙 Se menciona que el robot debe regresar al punto de inicio (home) después de seguir la secuencia de puntos.
- 🎥 Se indica que en un próximo video se explicará cómo crear un programa basado en los puntos grabados.
Q & A
¿Qué es necesario hacer antes de que un robot realice un programa automático?
-Es necesario grabar puntos previamente establecidos para que el robot los siga.
¿Cómo se llama el proceso de establecer rutas para un robot según el guion?
-El proceso se llama 'grabar puntos'.
¿Cuál es la función de los puntos grabados en el movimiento del robot?
-Los puntos grabados son secuencias que el robot memoriza y sigue para realizar movimientos específicos.
¿Qué herramienta se utiliza para asignar puntos al robot en el guion?
-Se utiliza una ruedita roja con la opción 'registrar' para asignar puntos.
¿Cómo se asigna un punto al robot según el video?
-Se mueve el robot a una posición deseada, se presiona 'grabar' y se acepta el punto asignado.
¿Cuál fue el primer punto grabado en el ejemplo del video?
-El primer punto grabado fue 'punto A'.
¿Cómo se indica que el robot debe moverse de un punto a otro?
-Se le dice al robot ir de un punto a otro punto utilizando instrucciones o iconos.
¿Qué se debe hacer después de grabar todos los puntos necesarios para el robot?
-Se debe crear un programa que le indique al robot seguir la secuencia de puntos grabados.
¿Cuál es la ubicación inicial y final del robot según el guion?
-El robot comienza y termina en 'home', que es su posición inicial.
¿Cómo se puede saber que el robot ha grabado todos los puntos necesarios para un programa?
-Se puede verificar que el robot ha grabado todos los puntos necesarios al final del guion, donde se muestran los puntos grabados.
Outlines

此内容仅限付费用户访问。 请升级后访问。
立即升级Mindmap

此内容仅限付费用户访问。 请升级后访问。
立即升级Keywords

此内容仅限付费用户访问。 请升级后访问。
立即升级Highlights

此内容仅限付费用户访问。 请升级后访问。
立即升级Transcripts

此内容仅限付费用户访问。 请升级后访问。
立即升级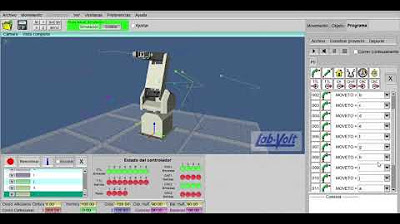





5.0 / 5 (0 votes)
