Setting Up Your Network for ROS | Getting Ready to Build Robots with ROS #2
Summary
TLDRThis video walks through the process of setting up a network for building robots with ROS, covering essential topics like network structure options, configuration using Netplan, and setting up remote access with SSH. It outlines three networking setups—using an existing network, creating an ad-hoc network, or using a dedicated travel router for flexibility and control. The video also demonstrates how to configure network settings, including IP addresses and Wi-Fi, and explains ROS-specific networking settings. With clear instructions, this guide helps viewers ensure a reliable, accessible network for their robotic systems.
Takeaways
- 😀 ROS simplifies networking tasks, allowing devices to communicate over the network without the need for complex code.
- 😀 You need a fast and reliable network connection, an internet connection for package installations, and control over the network to set static IP addresses.
- 😀 Using an existing network (home, school, workplace) is the simplest option, but it might lead to issues like IP conflicts and limited flexibility.
- 😀 The ad hoc or access point network method uses a base station to broadcast a Wi-Fi network for devices to connect, while still providing internet access through another interface.
- 😀 A dedicated network with a portable travel router can provide more control and internet access to devices in a private network, even without a direct connection to the external internet.
- 😀 Travel routers can connect to external networks (Wi-Fi, Ethernet, USB tethering) and share internet access with other devices in the robot setup.
- 😀 Netplan is a built-in tool that simplifies configuring network settings on Linux-based devices by writing settings into a configuration file.
- 😀 The configuration file used with Netplan allows easy editing, backup, and sharing of network settings between devices, and it can be applied using terminal commands.
- 😀 SSH (Secure Shell) enables remote access to devices, making it easier to run commands and manage files on the robot or base station remotely.
- 😀 ROS2 simplifies networking between devices out of the box, unlike ROS1, which requires environment variables to be manually set for inter-device communication.
Q & A
What is the primary goal of setting up a network for ROS?
-The primary goal is to ensure that devices can communicate with each other over the network, allowing remote control of robots, enabling multiple robots to work together, and splitting computation across different devices.
What are the three key requirements for a network setup in ROS?
-The three key requirements are: a fast, reliable connection between devices to send ROS messages; an internet connection for installing ROS packages; and control over the network for tasks like setting up static IP addresses.
What is the simplest network structure for ROS users, and what are its potential drawbacks?
-The simplest structure is to use an existing network, such as a home, school, or workplace network. The drawbacks include a lack of control over the network, potential issues with IP conflicts, unreliable reception, and difficulty moving setups for field tests or demonstrations.
How does the ad hoc or access point network structure work for ROS?
-In this setup, a device, such as the base station, broadcasts its own Wi-Fi network, and other devices connect to it. A second network interface, like Ethernet or a second Wi-Fi card, is used to share the internet connection with the devices in the ad hoc network.
What is the benefit of using a dedicated router for a ROS network?
-A dedicated router provides a solid, private network with full control over the connections between devices. It offers a reliable environment without interference from other networks, though it does not provide an internet connection by default.
What is a travel router, and how does it assist with ROS network setups?
-A travel router connects to an internet source and shares that connection with its own private network via Ethernet and Wi-Fi. In a ROS setup, it can help ensure that all devices are on a secure network while having internet access, even when away from home or office.
What is Netplan, and why is it recommended over the built-in network manager?
-Netplan is a tool used to configure network settings via a YAML file, providing an easier way to manage network settings in the terminal. It allows for quick editing, backup, and sharing of configuration files. It is recommended over the built-in network manager for greater control and flexibility.
How do you find the network interface name on a Linux system?
-To find the network interface name, run the 'ip adder' command in the terminal. The output will include the interface names, with Ethernet interfaces starting with 'e' and Wi-Fi interfaces starting with 'w'.
What should you keep in mind when writing a Netplan configuration file?
-Ensure that the YAML file is properly indented, as incorrect indentation can cause errors. Also, carefully input network settings like the interface name, IP address, subnet, gateway, DNS servers, and Wi-Fi information based on your specific setup.
What is SSH, and why is it important for remote access in ROS?
-SSH (Secure Shell) allows for secure, remote terminal access to another machine over the network. It is essential in ROS setups as it enables users to manage their robots remotely, install packages, transfer files, and use graphical applications without needing a physical connection to the device.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraVer Más Videos Relacionados
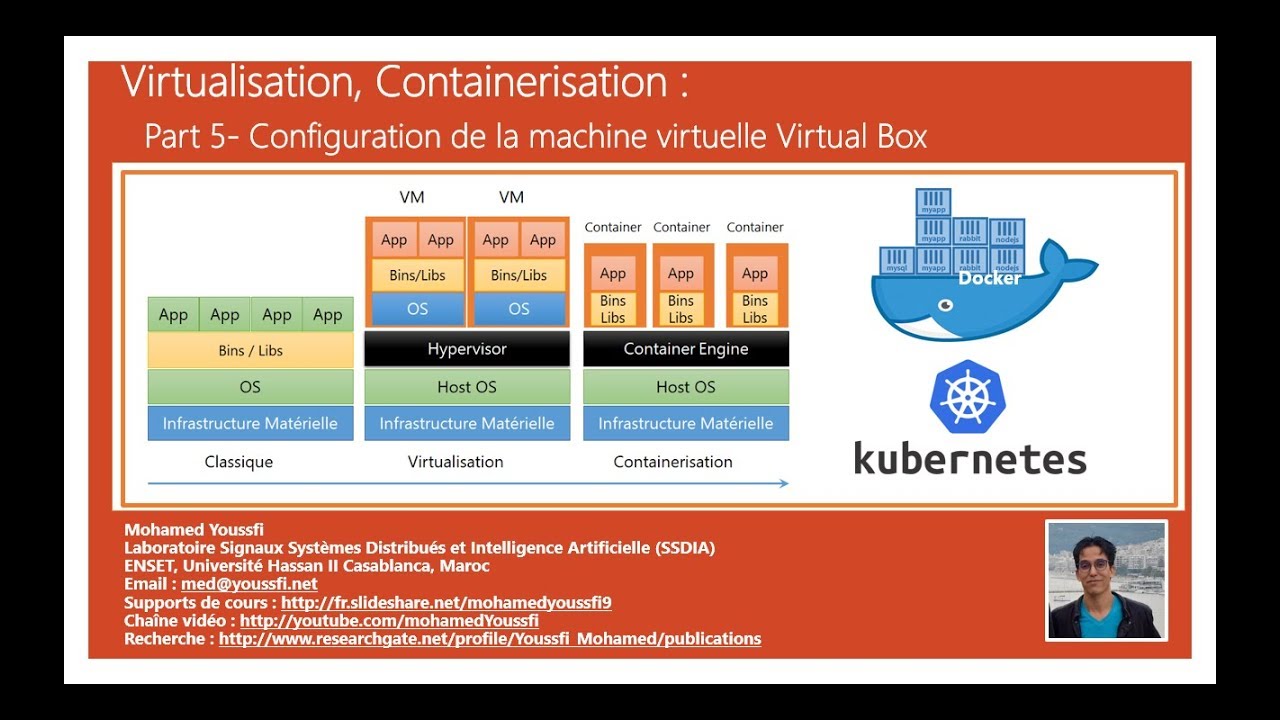
Part 5 - DOCKER Part 2

Cara Setting Mikrotik | Cara Konfigurasi Dasar Mikrotik

CARA SETTING MIKROTIK RB941 UNTUK PEMULA | KELAS MIKROTIK #6
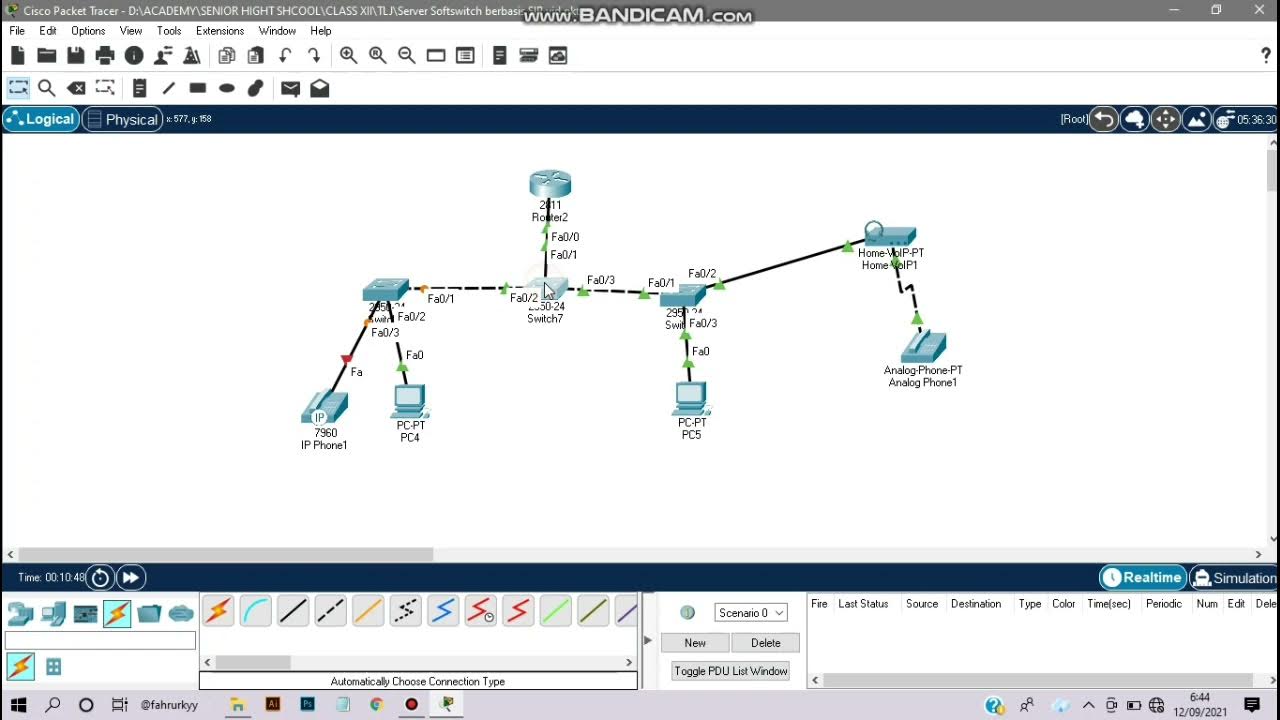
Cara Instalasi Server Softswitch Berbasis SIP di Cisco Packet Tracer

Konfigurasi Routing Dinamis di Cisco Packet Tracer #5 BGP (Border Gateway Protocol)
Instalação das máquinas virtuais usando o VirtualBox e imagem do Linux Debian.
5.0 / 5 (0 votes)
