SLAM A 07
Summary
TLDRThis video demonstrates a method for detecting cylinders in scan data using derivatives and difference quotients. It explains how to compute the derivative to identify falling and rising edges in the data, representing the start and end of cylinders. The solution addresses challenges like overlapping cylinders and background noise. A custom algorithm is introduced to sum and average the rays and depths of detected cylinders, handling edge cases and ensuring accurate detection. The video concludes with the implementation of a function to plot the scan data and the detected cylinders visually.
Takeaways
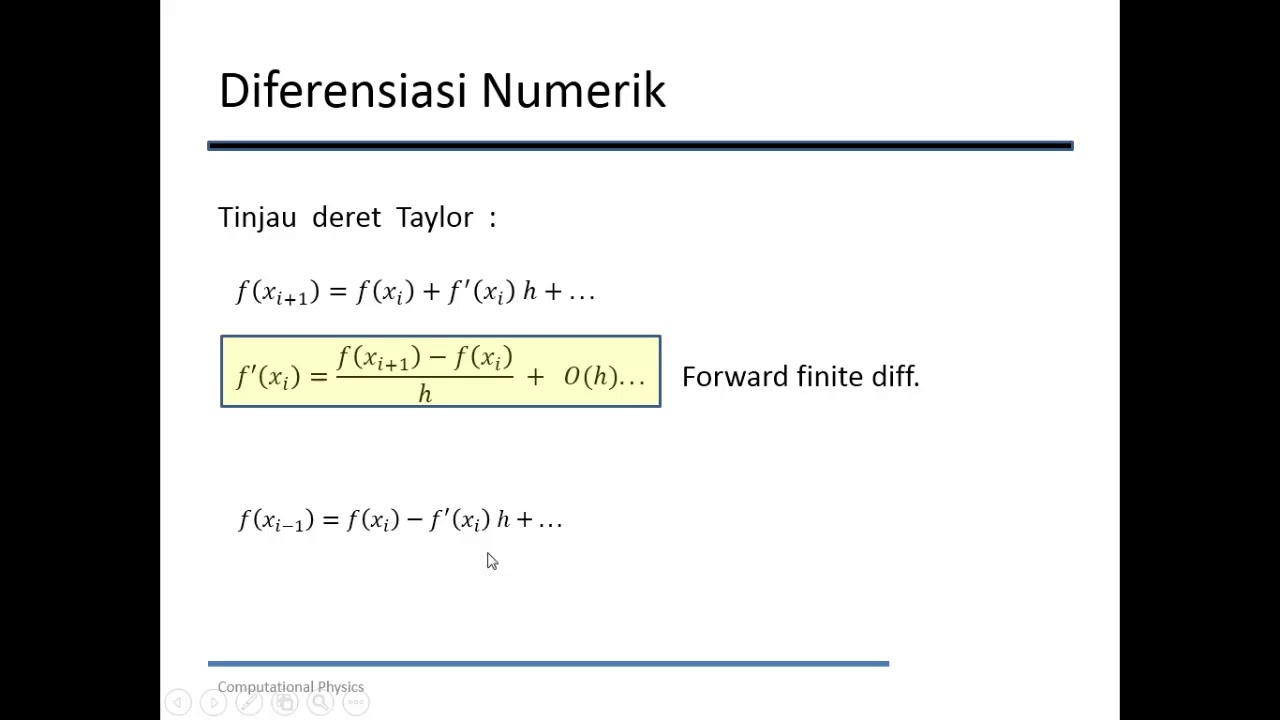
- 😀 The solution involves detecting cylinders in scan data using derivative values (difference quotients) to identify edges caused by cylinders.
- 😀 If both left and right values in the scan exceed a minimum distance, the derivative is computed, which identifies peaks corresponding to cylinder edges.
- 😀 If either of the values is smaller than the minimum distance, the program returns zero, as the edge does not correspond to a cylinder.
- 😀 The derivative calculation generates negative peaks for falling edges and positive peaks for rising edges, helping to identify cylinder boundaries.
- 😀 A threshold of +/- 100 is used to filter the derivative values and determine valid cylinder edges in the scan data.
- 😀 Special care is taken when overlapping or partially hidden cylinders are present, as the scan data may contain multiple peaks and valleys.
- 😀 When multiple cylinders are detected in the scan, the program can handle unusual cases like consecutive 'left-left' or 'right-right' edge indications.
- 😀 The algorithm computes the average ray and depth for each detected cylinder to determine its exact position and size.
- 😀 The program uses an `on_cylinder` flag to track whether the scan is currently detecting a cylinder and accumulates ray and depth values while on a cylinder.
- 😀 When the program encounters a significant depth jump (indicating a new cylinder or background object), it resets the accumulator and finalizes the previous cylinder's detection.
- 😀 The `find_cylinders` function is the core implementation, which takes the scan data, derivative values, and threshold as input, and returns a list of detected cylinders.
Q & A
What is the main approach used to detect cylinders in the scan data?
-The main approach involves calculating the derivative (difference quotient) of the scan data to detect edges. A positive peak indicates the rising edge of a cylinder, while a negative peak indicates the falling edge. A threshold value is used to identify significant changes in the data, which correspond to cylinder edges.
How are edge detections, like falling and rising edges, determined in the script?
-Edge detections are based on the derivative of the scan data. A negative peak in the derivative indicates a falling edge (start of a cylinder), and a positive peak indicates a rising edge (end of a cylinder). A threshold value is used to filter out minor variations and detect significant edges.
What does the 'on_cylinder' variable track in the program?
-The 'on_cylinder' variable is used to track whether the algorithm is currently processing a cylinder. It helps determine when to sum rays and depths for a cylinder and when to reset the sums after detecting the end of a cylinder.
Why is the minimum distance parameter important in the cylinder detection process?
-The minimum distance is crucial because it filters out small variations in the scan data that do not correspond to meaningful changes, like noise or irrelevant small peaks. This ensures that only valid cylinders are detected and prevents the algorithm from falsely identifying non-cylinder features.
How does the program handle overlapping cylinders or background objects?
-When overlapping cylinders or background objects are detected, the program will start over after identifying a significant depth jump. It uses the 'on_cylinder' flag to reset the sums and only processes valid cylinder edges by skipping over erroneous data caused by background interference.
What role does the 'derivative' function play in the overall program?
-The 'derivative' function calculates the difference quotient of the scan data, which is key to detecting edges (both rising and falling) in the data. These edges help identify the start and end points of cylinders in the scan.
What happens when a depth jump is detected in the scan data?
-When a depth jump is detected, the program identifies this as an edge or transition point between different objects (such as background and foreground cylinders). The algorithm uses this jump to reset the current cylinder tracking and ensures only valid cylinder edges are considered.
How does the program calculate the average ray and depth for each detected cylinder?
-The program sums the rays and depths for the points corresponding to a cylinder, and when a rising edge is detected, it computes the average ray (sum of rays divided by the number of points) and the average depth (sum of depths divided by the number of points) for that cylinder.
What is the significance of using a threshold value in the derivative calculation?
-The threshold value is used to ignore minor fluctuations in the derivative that are not relevant to the cylinder detection process. It ensures that only significant changes, which represent cylinder edges, are detected and used for further analysis.
What does the final output of the program look like after implementing the correct cylinder detection?
-The final output consists of the original scan data with detected cylinders marked on a plot. Each detected cylinder is represented by a red dot, indicating its precise location in the scan, showing the cylinder's average ray and average depth.
Outlines

此内容仅限付费用户访问。 请升级后访问。
立即升级Mindmap

此内容仅限付费用户访问。 请升级后访问。
立即升级Keywords

此内容仅限付费用户访问。 请升级后访问。
立即升级Highlights

此内容仅限付费用户访问。 请升级后访问。
立即升级Transcripts

此内容仅限付费用户访问。 请升级后访问。
立即升级

5.0 / 5 (0 votes)
