#21 Foreground-Background Architecture ("Superloop")
Summary
TLDRIn this lesson on embedded systems programming, the focus is on the foreground-background architecture, also known as the super-loop or main+interrupts. This fundamental approach is key for understanding Real-Time Operating Systems (RTOS) and is used in various embedded systems. The lesson covers how the architecture is implemented with interrupt handlers and background loops, along with code examples using the TivaC LaunchPad board. The instructor explains the importance of Board Support Packages (BSP), non-blocking event-driven code, and the use of polling state machines in embedded systems. The lesson sets the stage for more advanced topics like RTOS and state machines in future lessons.
Takeaways
- 😀 The foreground-background architecture, also known as the super-loop or main+interrupts, is a fundamental concept in embedded systems programming.
- 😀 This architecture is a key building block for understanding Real-Time Operating Systems (RTOS), which will be covered in upcoming lessons.
- 😀 To follow along with the lesson, you'll need to download two pieces of code from the course's companion website.
- 😀 The ARM-Keil MDK toolset is used for this lesson, replacing the previous Code Composer Studio due to compatibility issues.
- 😀 Keil MDK Lite, a free version of the toolset, is sufficient for all the projects in this course.
- 😀 The core concept of the lesson involves modifying a Blinky program to use a more precise delay function (BSP_delay) based on the SysTick interrupt.
- 😀 The SysTick interrupt improves timing precision by operating independently of compiler-generated code speed, with timing defined by a constant (BSP_TICKS_PER_SEC).
- 😀 Shared variables between the foreground (interrupts) and background (main loop) must be handled carefully, with volatile declarations and critical sections to avoid race conditions.
- 😀 The foreground/background architecture is widely used in embedded systems, including consumer electronics, home appliances, and platforms like Arduino.
- 😀 The background loop can be made non-blocking and event-driven, allowing the program to handle events more flexibly without waiting in polling loops.
- 😀 While the sequential and blocking background approach is simpler, the event-driven approach provides greater flexibility, though at the cost of increased complexity in the code.
Q & A
What is the foreground-background architecture in embedded systems?
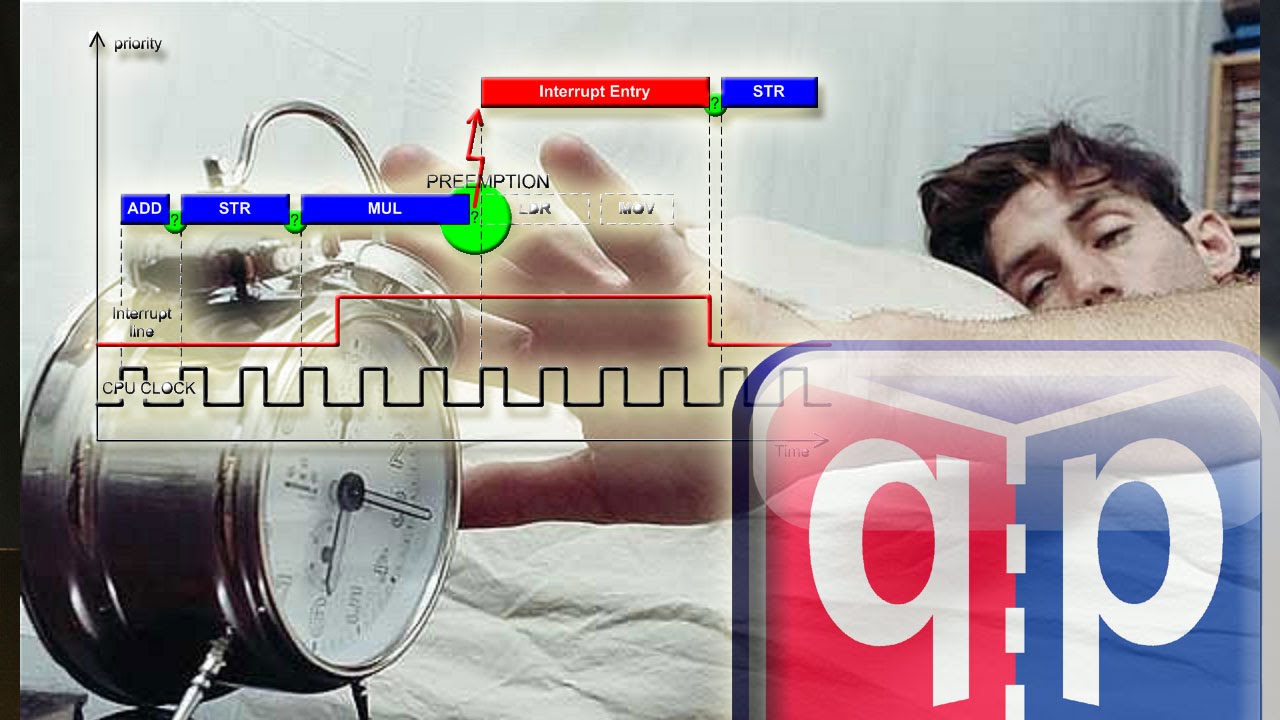
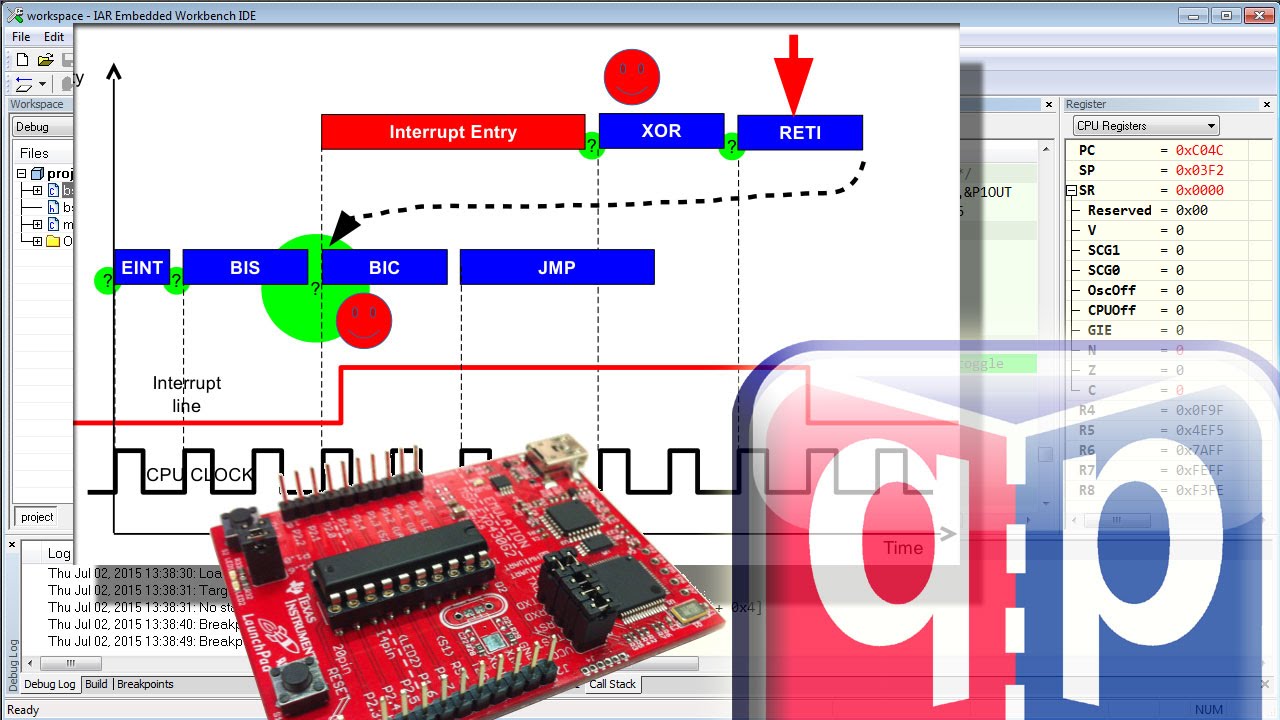
-The foreground-background architecture, also known as super-loop or main+interrupts, consists of two main parts: a background loop in the main function and interrupt handlers. The interrupts preempt the background loop but return to the point of preemption. The two parts communicate using shared variables.
Why is the foreground-background architecture important in embedded systems?
-This architecture is fundamental in embedded systems as it forms the basis for other architectures, especially Real-Time Operating Systems (RTOS). It is simple, efficient, and commonly used in consumer electronics and high-volume embedded applications.
What is the purpose of the Board Support Package (BSP) in embedded programming?
-The BSP abstracts the hardware-specific details of the board, such as initialization and LED handling, from the application code. This separation allows the same main application code to be used on different hardware platforms, enhancing portability and maintainability.
How does the `volatile` keyword work in the context of embedded systems programming?
-The `volatile` keyword tells the compiler that a variable may change unexpectedly, typically due to interrupt handlers. This ensures that the compiler does not optimize the variable's access, preventing race conditions and ensuring accurate program behavior when shared with interrupts.
What is the role of the SysTick interrupt in the BSP_delay() function?
-The SysTick interrupt provides precise timing for the delay function. It fires at a rate defined by `BSP_TICKS_PER_SEC` and increments a counter that the BSP_delay() function uses to calculate the elapsed time.
What is the difference between blocking and non-blocking code in embedded systems?
-Blocking code waits for specific events (like a timeout) to occur before progressing, while non-blocking code does not wait and continuously checks for events. Non-blocking code is more responsive and efficient as it doesn't block the execution of other tasks.
How does the non-blocking event-driven code improve the performance of an embedded system?
-Non-blocking, event-driven code allows the system to handle multiple events as they arrive, without waiting for previous events to complete. This leads to more efficient use of processing power, as the system is always active, responding to events in real-time.
What are the benefits of separating the main application code from the BSP?
-This separation leads to more modular and maintainable code. It allows the main application to be independent of hardware specifics, making it easier to port the application to different boards or even run it on a desktop PC with minimal changes.
What are the potential drawbacks of using interrupt-driven programming in embedded systems?
-Interrupt-driven programming can lead to longer interrupt service routines (ISRs), which may interfere with the background loop and other interrupts. Managing shared variables between interrupts and the background loop requires careful synchronization to avoid race conditions.
What role does polling play in the foreground/background architecture?
-Polling in the foreground/background architecture is used to wait for specific events, such as a timeout or hardware interrupt. While polling simplifies the code, it can waste CPU cycles, especially when waiting for events in a blocking manner, rather than using a more efficient event-driven approach.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video
#16 Interrupts Part-1: What are interrupts, and how they work
#17 interrupts Part-2: How most CPUs (e.g. MSP430) handle interrupts?

#2 How to change the flow of control through your code

#8 Functions in C and the call stack

#22 RTOS Part-1: What is a Real-Time Operating System?

Lesson 1. Introduction to the Course (see note about required USB cable)
5.0 / 5 (0 votes)