Introduction to Registers | What is Shift Register? Types of Shift Registers
Summary
TLDRThis video from the All About Electronics YouTube channel dives into the concept of registers in digital circuits, focusing on their role as memory elements capable of storing multiple bits of data. It explains the basic 4-bit register, its limitations, and how it can be improved with a load signal to control data input without occupying the data bus continuously. The video also introduces shift registers, discussing their ability to shift binary data between connected flip flops and the various methods of data loading and retrieval. The potential applications of shift registers in time delay generation, data conversion, and arithmetic operations are highlighted, with a promise of more detailed exploration in future videos.
Takeaways
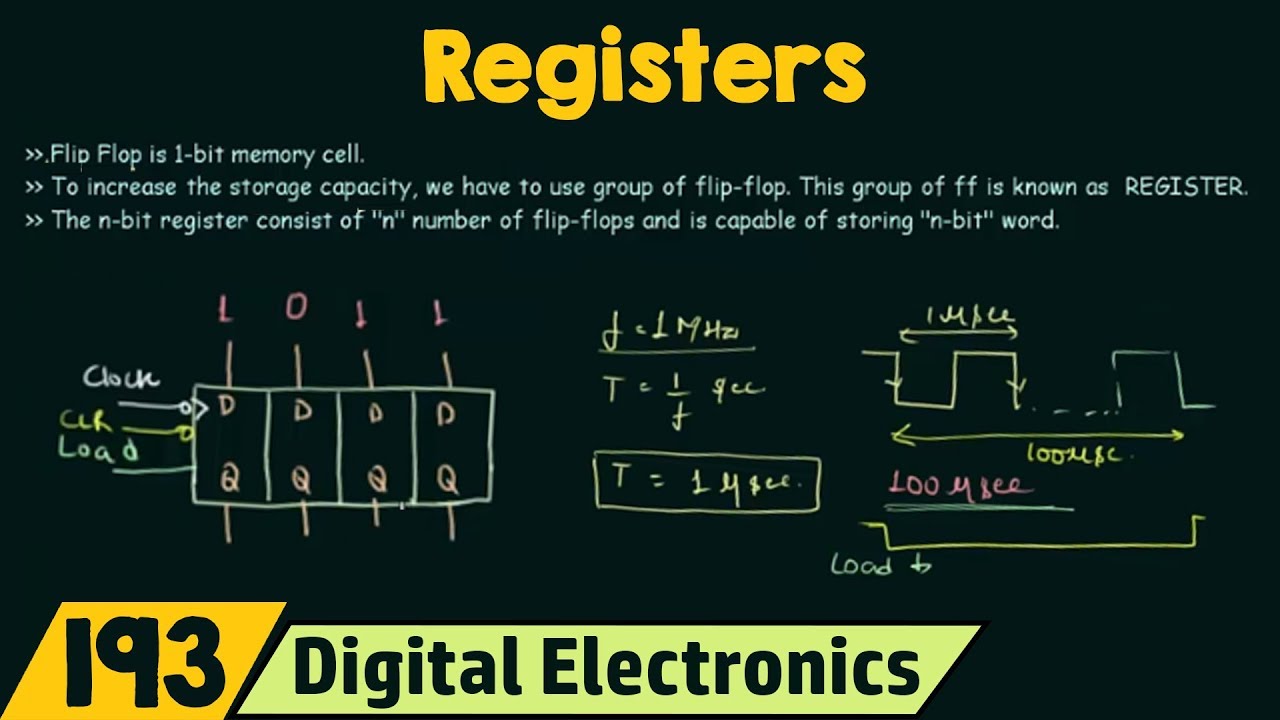
- 😀 Registers are groups of flip flops that can store n-bit data in digital circuits.
- 🔁 D flip flops are commonly used in registers due to their single input and straightforward data storage at clock transitions.
- ⏰ The basic function of a register is to store data at each clock transition and make it accessible at the output.
- 🚫 A plain register is impractical as it continuously occupies the data bus, which can be problematic in synchronous systems.
- 🔄 An AND gate can be used to control the clock signal to a register, enabling data loading only when required.
- 🛑 The load signal in a register acts as a synchronous input, loading data at clock transitions when high.
- 🔧 Registers can be equipped with an asynchronous clear input to reset all flip flops to zero when activated.
- 🔄 Shift registers are a type of register where binary data can be shifted between neighboring flip flops.
- 🔢 Shift registers can be loaded and retrieved in two ways: serially or in parallel, leading to four types based on these combinations.
- 🕒 Shift registers are useful not only for data storage but also for time delay generation, data conversion, and arithmetic operations.
- 📚 The video promises to cover more details on different types of shift registers in upcoming videos.
Q & A
What is the basic function of a flip flop in digital circuits?
-A flip flop is a basic memory element in digital circuits that can store only one bit of information.
Why are multiple flip flops needed in a digital circuit like a microprocessor?
-Multiple flip flops are needed to store or process data in multiple bits, such as 16, 32, or 64 bits, as these circuits handle more complex data storage and processing.
What is a register in the context of digital circuits?
-A register is a group of flip flops that can store n bits of data, allowing for the storage of larger data sets in a single unit.
Why are D flip flops typically used in registers?
-D flip flops are used in registers because they have only one input, which simplifies the process of storing the input data at the clock transition.
How does the presence of a Master Clock affect the operation of a register?
-The Master Clock, being common between different digital blocks, dictates the timing of data storage in a register. If the register operates at 1 gigahertz, data at the inputs is loaded into the register every nanosecond.
What is the issue with using a register without any control mechanism for data loading?
-Without a control mechanism, the register would continuously load data from the data bus, potentially occupying it for an extended period and preventing other components from accessing it.
How can the data bus be freed up by controlling the register's clock?
-By enabling the clock only when data needs to be loaded into the register through an AND gate controlled by a load signal, the data bus can be used more efficiently and not occupied continuously.
What is the drawback of using an AND gate to control the clock signal in a synchronous system?
-Using an AND gate introduces a propagation delay, causing the register to receive the clock signal after a delay, which is undesirable in synchronous systems where all elements should receive the clock simultaneously.
How does a load signal control the operation of a register?
-A load signal, when high, allows data bits to reach the flip flops through an AND gate and be loaded into the register at the clock transition. When the load signal is low, the register maintains the previous data.
What is a shift register and how does it differ from a standard register?
-A shift register is a type of register where the output of one flip flop is connected to the input of the next, allowing for the shifting of binary data between neighboring flip flops, which is not present in a standard register.
What are the two methods of loading data into a shift register?
-The two methods of loading data into a shift register are serial loading, where new bits are loaded with each clock pulse, and parallel loading, where all bits are loaded simultaneously in a single clock cycle.
What are the four types of shift registers based on data loading and retrieval methods?
-The four types of shift registers are serial IN serial OUT, serial IN parallel OUT, parallel IN serial OUT, and parallel IN parallel OUT, each determined by the method of data loading and retrieval.
What additional applications can shift registers be used for beyond data storage?
-Shift registers can be used for time delay generation, serial to parallel conversion, parallel to serial data conversion, and arithmetic operations.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantVoir Plus de Vidéos Connexes

Latch and Flip-Flop Explained | Difference between the Latch and Flip-Flop

Introduction to Sequential Circuits | Important

Semiconductor Memories: ROM Explained | Types of ROM | Applications of ROM
Introduction to Registers
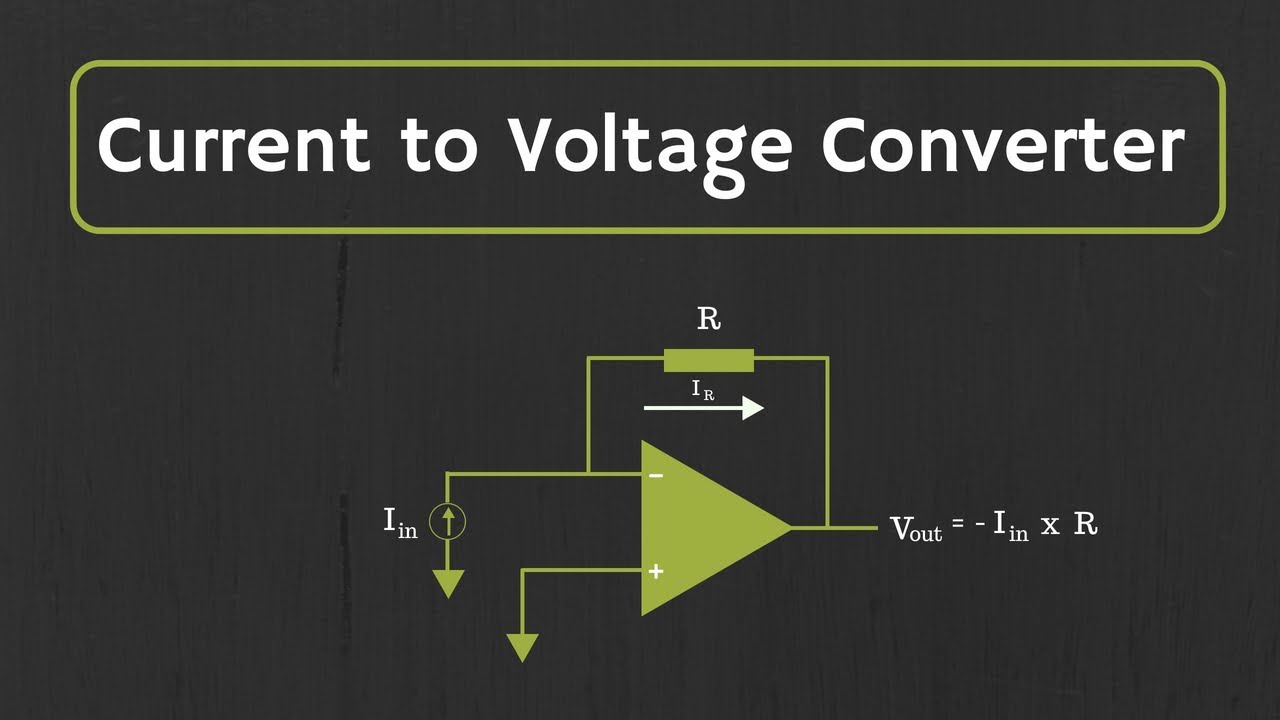
Op-Amp: Current to Voltage Converter (Transimpedance Amplifier) and it's applications

SR Latch and Gated SR Latch Explained | SR Latch using NOR gates and NAND gates
5.0 / 5 (0 votes)
