ES2C6 L4c
Summary
TLDRThe lecture explores the tuning of Proportional (P) controllers, focusing on Ziegler-Nichols tuning rules. It discusses the significance of these rules in process control, especially when models of the system are unavailable. Two methods are presented: the first for systems resembling first-order behavior without integrators, and the second for second-order systems exhibiting sustained oscillations. The goal is to achieve approximately 25% maximum overshoot. Practical examples illustrate how initial tuning parameters can be adjusted to meet design criteria, emphasizing that further fine-tuning is often necessary.
Takeaways
- 😀 The Ziegler-Nichols (Z-N) tuning methods are fundamental for adjusting P controllers in feedback control systems.
- 😀 The first method is used for systems resembling first-order dynamics without integrators, focusing on time delay (L) and time constant (T).
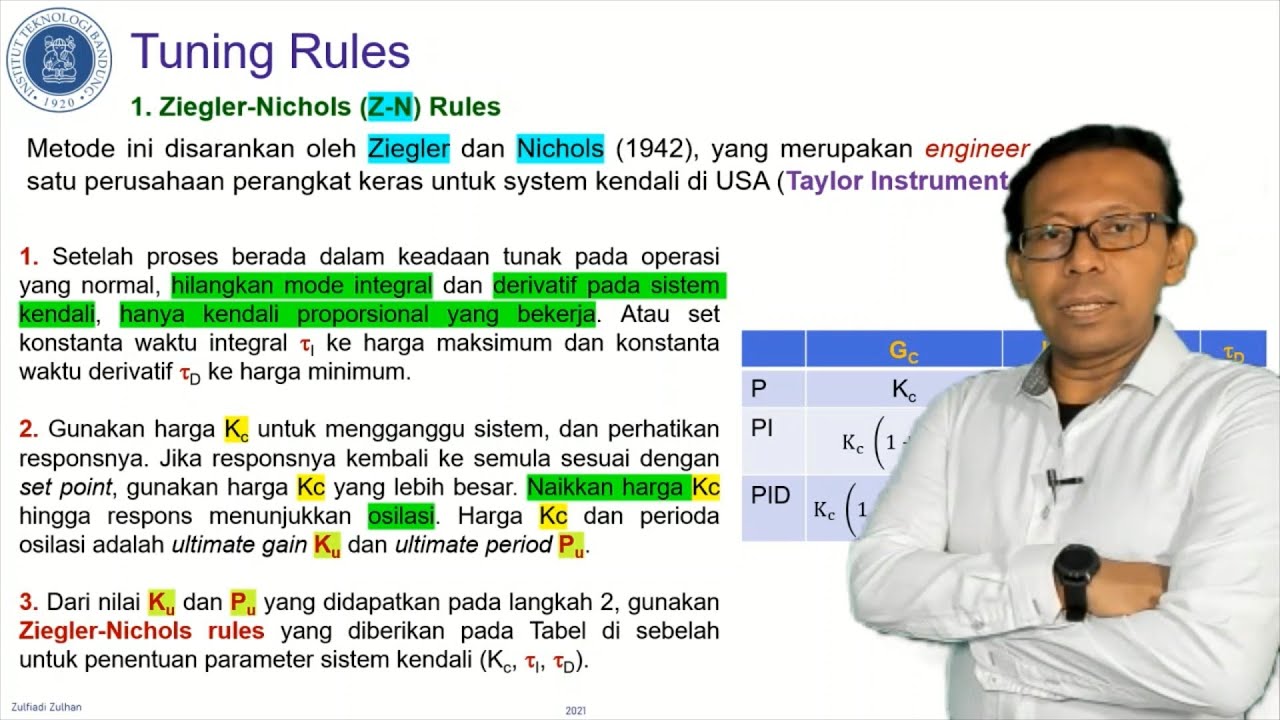
- 😀 The second method is applicable to second-order systems that exhibit sustained oscillations, helping to determine critical gain (Kcr) and critical period (Pcr).
- 😀 The main goal of Z-N tuning is to achieve a maximum overshoot of approximately 25% in system response.
- 😀 Initial tuning gains provided by Z-N methods may not guarantee meeting design specifications, necessitating further fine-tuning.
- 😀 Z-N tuning rules remain relevant today, even with advanced modeling techniques, as they provide a useful starting point for tuning.
- 😀 For the first method, the S-shaped curve in the step response is crucial for calculating L and T.
- 😀 When using the second method, it is essential to incrementally increase proportional gain (Kp) to identify the point of sustained oscillation.
- 😀 Fine-tuning parameters such as Kp, Ti, and Td is critical for optimizing controller performance post-initial adjustments.
- 😀 Understanding the dynamics of the specific plant being controlled is essential for selecting the appropriate Z-N method.
Q & A
What is the main focus of the lecture discussed in the transcript?
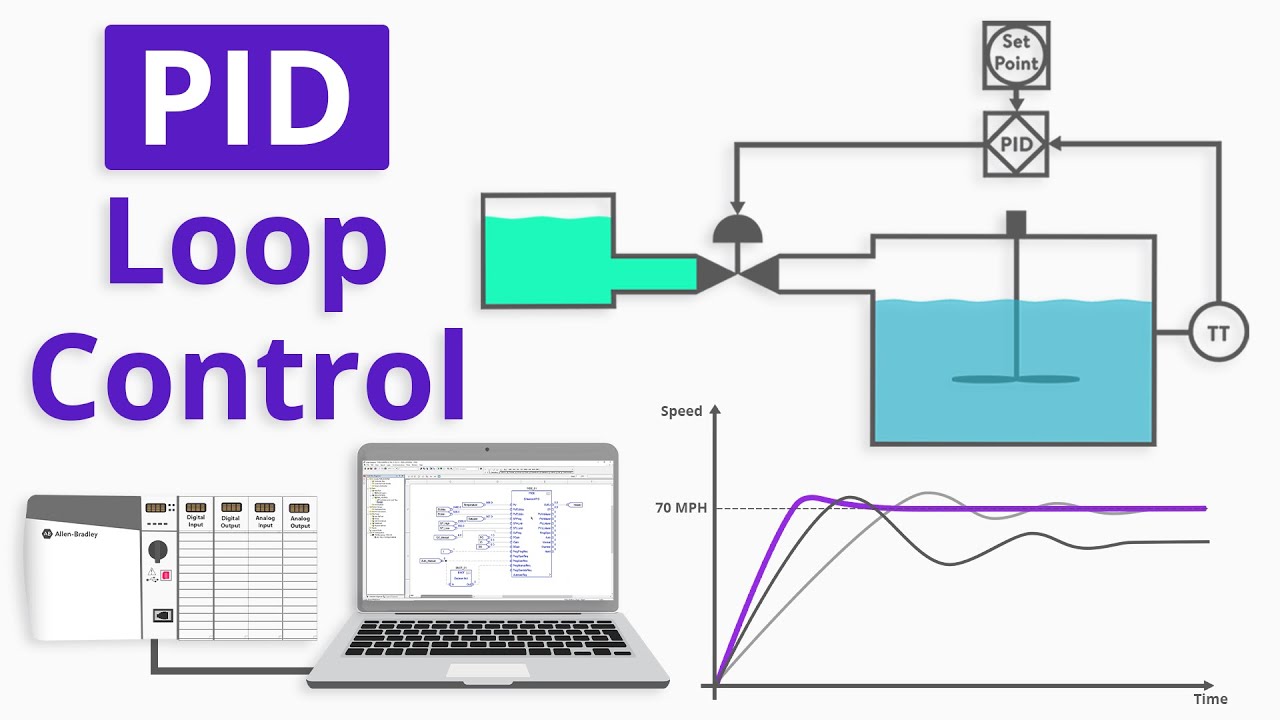
-The lecture focuses on the tuning of P controllers, specifically the Ziegler-Nichols tuning rules for PID control.
What are the learning outcomes expected from this lecture?
-Students will learn about the Ziegler-Nichols tuning rules for P control and how to apply these rules to tune controllers effectively.
Why is it important to tune PID controllers?
-Tuning PID controllers is crucial for ensuring that control systems perform optimally, meeting design specifications such as minimizing overshoot and settling time.
What does the first method of Ziegler-Nichols tuning apply to?
-The first method is applicable to systems that exhibit first-order behavior and do not have integrators or dominant complex conjugates.
How do you determine the delay and time constant in the first method?
-The delay can be calculated by observing when the system starts to respond to an input, and the time constant can be determined by drawing a tangent line at the inflection point of the S-shaped curve.
What type of systems does the second method of Ziegler-Nichols tuning apply to?
-The second method is useful for second-order systems that can exhibit sustained oscillations when proportional gain is increased.
What is the critical gain (Kcr) in the context of the second method?
-The critical gain is the proportional gain value at which the system exhibits sustained oscillations, indicating the boundary between stability and instability.
What does achieving a 25% maximum overshoot signify in control systems?
-Aiming for a 25% maximum overshoot helps to prevent excessive overshoot that could damage systems, particularly in processes like steam engines.
What is the purpose of fine-tuning the controller after initial tuning using Ziegler-Nichols methods?
-Fine-tuning is necessary because initial tuning may not meet design criteria; it allows for adjustments to achieve the desired performance characteristics.
Why might the Ziegler-Nichols tuning rules still be relevant today despite advancements in modeling?
-The Ziegler-Nichols rules provide a practical starting point for tuning, especially in scenarios where precise models are difficult to obtain or where system dynamics are complex.
Outlines

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenMindmap

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenKeywords

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenHighlights

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenTranscripts

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenWeitere ähnliche Videos ansehen

13 PSK Kontroller Pid Tuning Gain 1
07. MG3217 Kendali Proses S01: PID Tuning, Ziegler-Nichols, Cohen-Coon

PID Tuning dengan Ziegler-Nichols (Seri PID Controller part2)
How to Program a Basic PID Loop in ControlLogix
A PID Tuning Guide | Understanding PID Control, Part 4

07. MG3217 Kendali Proses S02: PID Tuning, Ziegler-Nichols, Cohen-Coon (Latihan Soal))
5.0 / 5 (0 votes)
