PID Tuning dengan Ziegler-Nichols (Seri PID Controller part2)
Summary
TLDRThis video focuses on the process of tuning a PID controller, specifically using the Ziegler-Nichols method. The presenter walks through a practical example, where the goal is to determine the ideal controller parameters (Kp, Ki, Kd) to achieve an optimal step response. The video demonstrates how to find the critical gain, calculate the oscillation period, and apply the Ziegler-Nichols tuning formula. It also highlights the need for fine-tuning to improve performance, particularly to reduce overshoot and steady-state error. The method is effective for systems with clear oscillation characteristics but may not be applicable to all systems.
Takeaways
- 😀 Tuning PID controllers involves determining ideal parameters (KP, KI, KD) to achieve desired system responses.
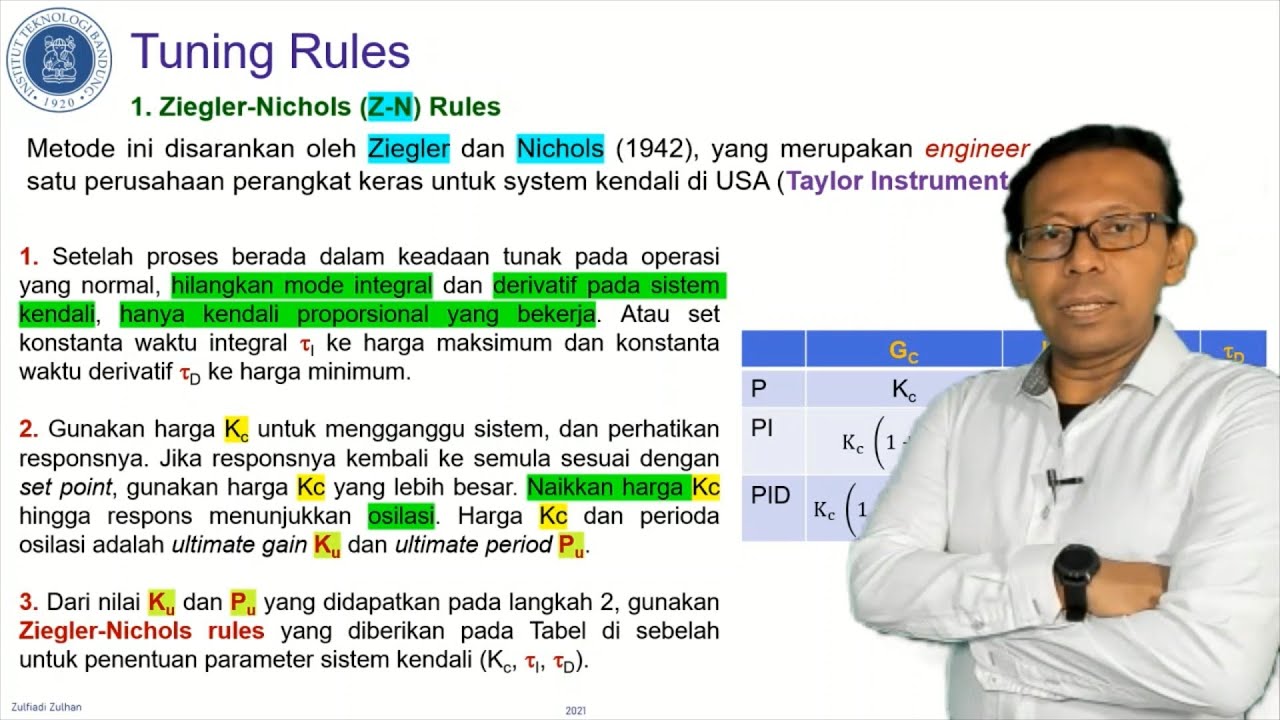
- 😀 The Ziegler-Nichols method is a widely used standard approach for manual PID tuning, developed in the 1960s.
- 😀 The first step in tuning is setting KI and KD to zero, simplifying the system to focus on KP adjustment.
- 😀 To determine the critical gain (KP), the goal is to find the value that causes the system to oscillate at the boundary between stability and instability.
- 😀 The root locus method is a tool to visualize how system stability changes as KP varies.
- 😀 The critical gain value (KP) was determined to be 30 in this example, ensuring the system is on the edge of stability.
- 😀 The next step is to find the oscillation period, with a calculated period of approximately 2.8 seconds.
- 😀 Using the Ziegler-Nichols table, KP, KI, and KD values are derived for tuning the PID controller based on the critical values.
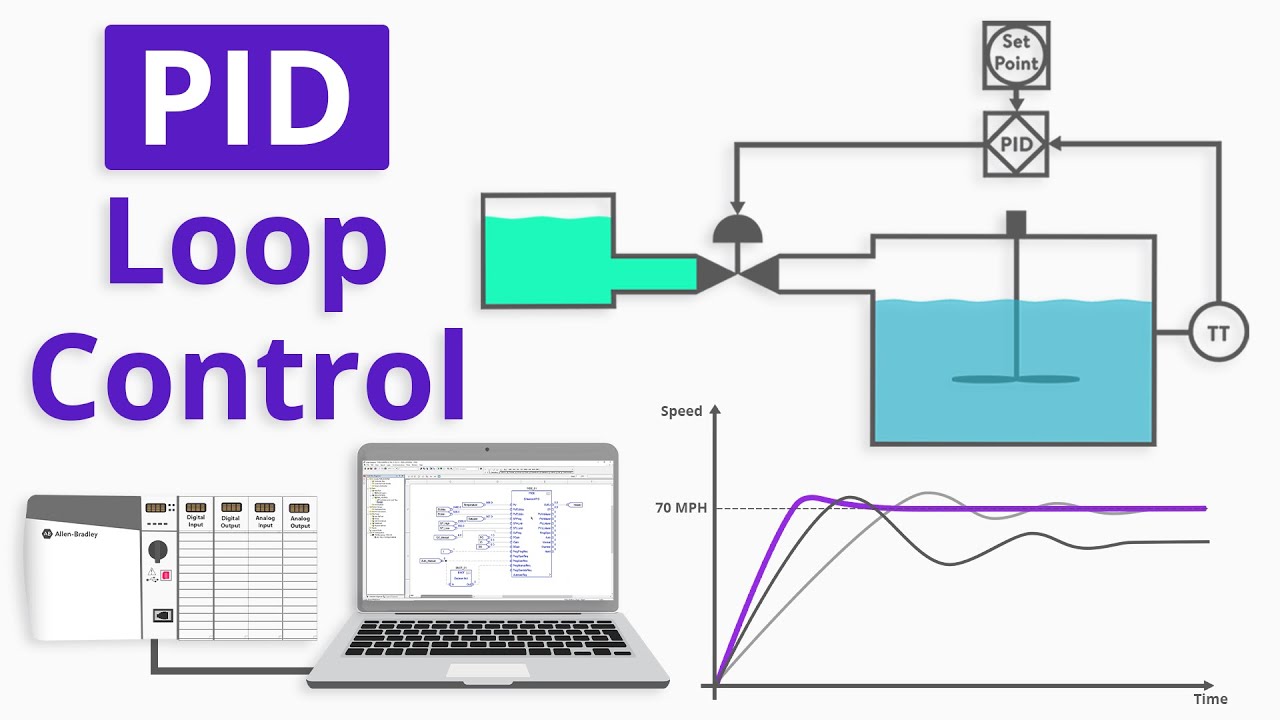
- 😀 After applying the initial Ziegler-Nichols tuning, the system's step response showed high overshoot, indicating the need for fine-tuning.
- 😀 Fine-tuning PID parameters, such as increasing KP to 39 and adjusting KI and KD, results in improved system performance, reducing overshoot and steady-state error.
- 😀 The Ziegler-Nichols method is only suitable for systems that can produce sinusoidal oscillations, as it relies on identifying the critical gain for stability analysis.
Q & A
What is the main topic discussed in this video?
-The main topic discussed in the video is the process of tuning P&ID (Proportional-Integral-Derivative) controllers, focusing on finding the ideal parameters for achieving desired system response, such as overshoot and steady-state error control.
What is the definition of 'tuning' in the context of this video?
-Tuning refers to the process of determining the ideal parameters (Kp, Ki, Kd) for a PID controller to achieve the desired system response, which includes controlling overshoot and steady-state error.
What is the Ziegler-Nichols method and how is it used in this context?
-The Ziegler-Nichols method is a standard technique used for tuning PID controllers. It is applied by adjusting the proportional, integral, and derivative parameters to achieve a good system response. The method was introduced in the 1960s and is widely used for manual PID tuning.
What is the role of 'critical value' (Kp) in the tuning process?
-The critical value (Kp) is the value that causes the system to oscillate without growing or damping. It represents the boundary between stability and instability in the system. Finding this value is essential for proper tuning.
How is the critical value determined using Root Locus?
-The critical value is determined by adjusting Kp until the system reaches the point of marginal stability. This can be observed on the Root Locus plot where the system transitions between stable and unstable regions.
What is the significance of the period of oscillation in the tuning process?
-The period of oscillation helps determine the frequency at which the system will oscillate when it reaches marginal stability. This period is crucial for calculating other tuning parameters and ensuring a good response.
What are the Ziegler-Nichols tuning constants, and how are they calculated?
-The Ziegler-Nichols tuning constants are calculated using the critical value (Kp) and the oscillation period (Pcr). These constants are used to determine the proportional, integral, and derivative gains for the PID controller.
What are the key steps in applying the Ziegler-Nichols tuning method?
-The key steps include setting the integral and derivative gains (Ki and Kd) to zero, determining the critical value of Kp, finding the oscillation period, and then applying the Ziegler-Nichols formulas to calculate the PID parameters.
What is fine-tuning, and why is it necessary after using Ziegler-Nichols?
-Fine-tuning involves making adjustments to the PID parameters after the initial Ziegler-Nichols tuning to further optimize the system's response, particularly to reduce overshoot and improve steady-state error.
When can the Ziegler-Nichols method not be used for PID tuning?
-The Ziegler-Nichols method cannot be used for systems that do not exhibit oscillatory behavior at the critical point or where the system does not have a clear boundary between stability and instability, as this would prevent the identification of a critical value.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video
How to Program a Basic PID Loop in ControlLogix

14 PSK Kontroller Pid Routh Hourwitz 1
A PID Tuning Guide | Understanding PID Control, Part 4
07. MG3217 Kendali Proses S01: PID Tuning, Ziegler-Nichols, Cohen-Coon

13 PSK Kontroller Pid Tuning Gain 1

07. MG3217 Kendali Proses S02: PID Tuning, Ziegler-Nichols, Cohen-Coon (Latihan Soal))
5.0 / 5 (0 votes)