✅ Robot Seguidor de Luz, Conexiones Detalladas
Summary
TLDREn este video aprenderás a construir un robot seguidor de luz paso a paso. Se explican detalladamente las conexiones de componentes como la fotorresistencia, transistores, resistencias, LED y motorreductores en un protoboard. Además, se proporciona una guía visual clara para que puedas seguir fácilmente cada etapa del montaje del circuito y la parte mecánica del robot. El objetivo es que al finalizar, puedas tener tu propio robot que reaccione a la luz, con instrucciones sencillas y prácticas. ¡No olvides apoyar el video con un like y suscribirte para más proyectos como este!
Takeaways
- 😀 Se va a enseñar cómo armar un robot seguidor de luz paso a paso, con explicaciones detalladas sobre cada componente y su conexión.
- 😀 La fotorresistencia (LDR) es el componente clave para detectar la luz, conectada a una resistencia de 100k y 1k para su funcionamiento.
- 😀 Se utiliza un protoboard para realizar las conexiones, aprovechando sus puntos de conexión compartidos para simplificar el montaje.
- 😀 El transistor 2N2222A es crucial en el circuito, con sus tres pines (emisor, base y colector) desempeñando roles específicos en el control del robot.
- 😀 El LED tiene polaridad, siendo necesario conectar la pata más larga al colector del transistor para asegurar su correcto funcionamiento.
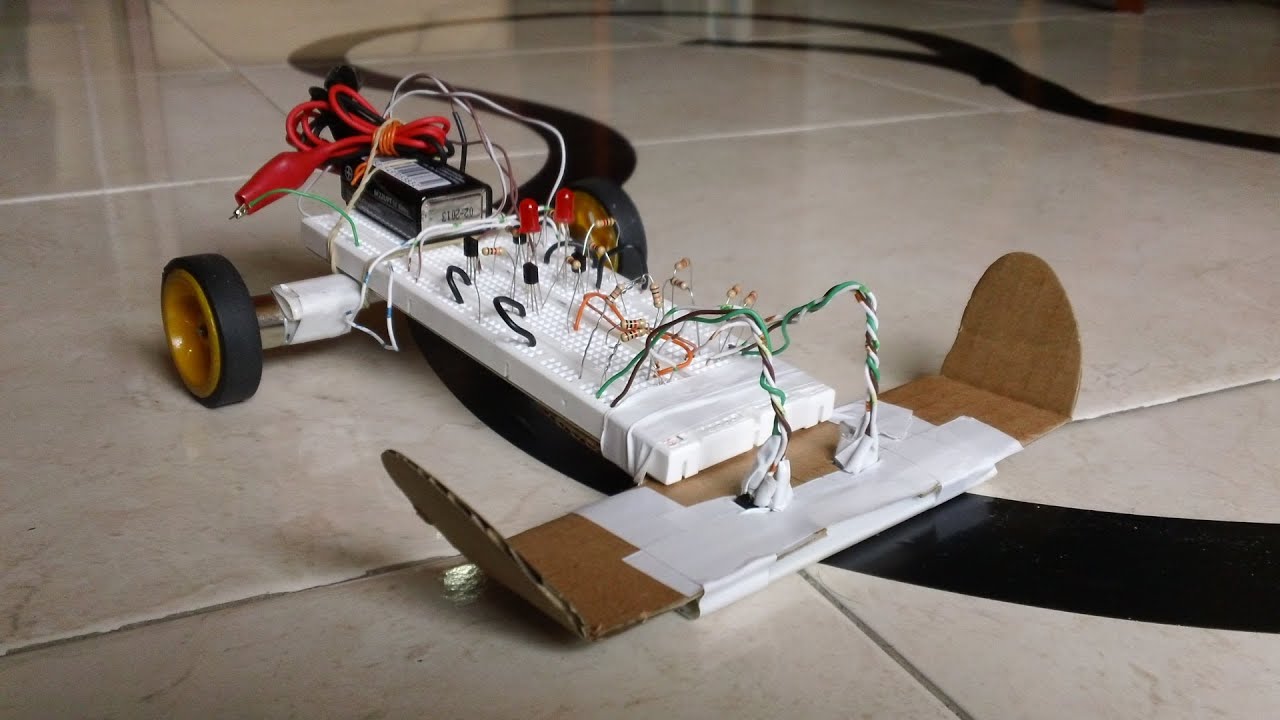
- 😀 Se debe conectar un motorreductor a los transistores para controlar el movimiento del robot, con cables bien organizados entre los componentes.
- 😀 El montaje incluye dos fotoresistores y dos transistores para gestionar ambos motores de manera cruzada, permitiendo que el robot se mueva hacia la luz.
- 😀 Las resistencias de 100k y 1k tienen valores específicos (marrón-negro-amarillo-dorado para la primera y marrón-negro-rojo-dorado para la segunda).
- 😀 El robot es capaz de seguir la luz, reaccionando a la intensidad de la misma gracias a la lectura de las fotorresistencias y el control de los transistores.
- 😀 Se recomienda usar la vista aumentada del protoboard para revisar las conexiones y evitar errores en el montaje, además de apoyar el proceso con videos complementarios.
Q & A
¿Qué componente se conecta primero en el protoboard para el montaje del robot seguidor de luz?
-Se comienza conectando la fotorresistencia LDR al protoboard, uniendo un extremo a negativo y el otro a un punto del protoboard.
¿Cómo se conecta la resistencia de 100k en el montaje?
-La resistencia de 100k se conecta de manera que su parte superior se conecta a positivo y la parte inferior al mismo punto donde se encuentra la fotorresistencia.
¿Cuál es el propósito de la resistencia de 1k en el circuito?
-La resistencia de 1k se conecta entre la fotorresistencia y la resistencia de 100k, y su otro extremo se conecta al punto donde más adelante se conectará la base del transistor.
¿Qué debe saber el usuario sobre las patas del transistor 2N2222A?
-El transistor 2N2222A tiene tres patas: la pata izquierda es el emisor, la del centro es la base y la derecha es el colector.
¿Cómo se conecta la base del transistor 2N2222A?
-La base del transistor se conecta al punto intermedio entre la fotorresistencia y la resistencia de 100k, y es crucial conectar una resistencia de 1k entre la base y positivo.
¿Cómo se conecta el LED en el montaje?
-El LED se conecta con su pata larga (positiva) al colector del transistor y la pata corta (negativa) se conecta a la base del segundo transistor.
¿Qué componente se conecta a la pata del emisor del transistor 2N2222A?
-Un cable se conecta desde la pata del emisor del transistor hacia el negativo del circuito.
¿Cómo se conecta el motorreductor en el montaje del robot?
-El motorreductor se conecta entre el colector del segundo transistor y un punto de positivo, cruzado con el motor del lado izquierdo para ambos motores del robot.
¿Por qué es importante la polaridad del LED en este proyecto?
-La polaridad del LED es importante porque si se conecta de manera incorrecta, el LED no funcionará. La pata más larga es positiva y debe conectarse al colector del transistor.
¿Cómo se realiza el montaje para el otro lado del robot?
-El montaje para el lado izquierdo del robot debe ser exactamente igual que para el lado derecho, incluyendo las conexiones de la fotorresistencia y el motor, pero los cables deben ir cruzados entre ambos lados.
Outlines

此内容仅限付费用户访问。 请升级后访问。
立即升级Mindmap

此内容仅限付费用户访问。 请升级后访问。
立即升级Keywords

此内容仅限付费用户访问。 请升级后访问。
立即升级Highlights

此内容仅限付费用户访问。 请升级后访问。
立即升级Transcripts

此内容仅限付费用户访问。 请升级后访问。
立即升级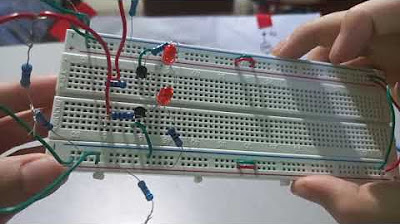




5.0 / 5 (0 votes)
