14 PSK Kontroller Pid Routh Hourwitz 1
Summary
TLDRThis video explains how to find PID controller parameters using the Root Locus method, focusing on gain margin and frequency margin. The process involves analytical methods rather than trial and error, as seen in previous methods like Ziegler-Nichols. The video covers the steps for determining these margins, calculating the controller parameters, and using MATLAB for Root Locus analysis. Key concepts such as stability limits, oscillation conditions, and controller formulas for PI and PID controllers are explored, with practical examples provided to aid understanding of the process.
Takeaways
- 😀 The script explains the process of finding PID controller parameters using the Root Locus (Routh-Hurwitz) method.
- 😀 Unlike the trial-and-error method, the Routh-Hurwitz method uses analytical techniques for determining the parameters.
- 😀 The key focus is on determining the gain margin and phase margin through a step-by-step approach.
- 😀 The first step in the process is to find the gain margin (GM) and phase margin (PM) from the Root Locus diagram.
- 😀 The formula for calculating the proportional controller (PC) is derived using gain margin and frequency margin.
- 😀 The gain margin is calculated at a point where the system oscillates, and this value is crucial for system stability.
- 😀 The frequency margin is found using the system’s transfer function, and its value helps in defining the controller parameters.
- 😀 The method involves using a closed-loop system block diagram to analyze the system and determine the parameters.
- 😀 The results from the Root Locus graph and gain frequency analysis are then used to derive the controller values for P, PI, and PID controllers.
- 😀 MATLAB and other tools can be used to plot the Root Locus graph for further analysis and to verify system stability.
- 😀 The process includes calculating the PID control parameters based on the Ziegler-Nichols (ZN) method, as discussed in previous sessions.
Q & A
What is the primary method used for searching PID controller parameters in the script?
-The primary method discussed in the script for searching PID controller parameters is the Root Locus (Rut Hurwis) method.
How does the Root Locus method differ from the trial and error method?
-Unlike the trial and error method, which relies on guessing and testing, the Root Locus method uses an analytical approach to determine the stability and performance of the system.
What are the first steps involved in using the Root Locus method?
-The first steps involve finding the gain margin and phase margin using the Root Locus method, which then leads to determining the system's parameters like KP and omegaac.
How is the gain margin (Gm) determined?
-The gain margin is determined by observing the point at which the system oscillates or becomes unstable. This is done by finding the value of k that makes the system oscillate.
What is the formula for calculating the gain margin in the Root Locus method?
-The gain margin is calculated using the formula 2π/omegaC, where omegaC is the cutoff or crossover frequency.
What does omegaac represent in the context of PID controller tuning?
-Omegaac represents the frequency margin or the point where the system transitions from stability to oscillation.
What role does the frequency margin (omegaC) play in determining controller parameters?
-The frequency margin (omegaC) helps determine the period of oscillation, which is then used to calculate controller parameters like KP, Ti, and Td.
How is the phase margin (PM) related to stability in a system?
-The phase margin indicates the stability of the system. A larger phase margin typically means a more stable system, and it helps determine the necessary adjustments to achieve the desired stability.
What controller parameters can be determined using the Root Locus method?
-The controller parameters that can be determined using the Root Locus method include KP (proportional gain), Ti (integral time), and Td (derivative time).
What is the result of applying the PID control formula using the Root Locus method?
-The result of applying the PID control formula using the Root Locus method provides the controller parameters, which could include formulas such as 1.002 + 0.16/s + 1.573s for the PID controller.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video
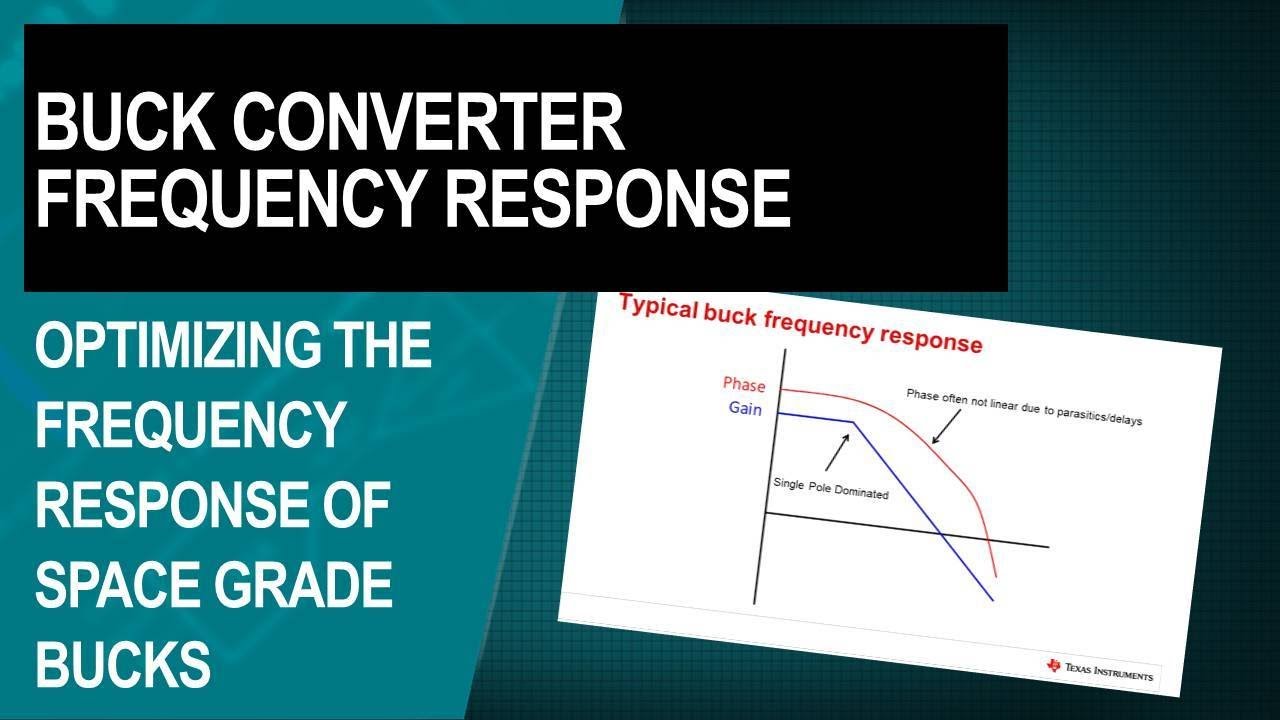
Understanding space-grade buck converter frequency response
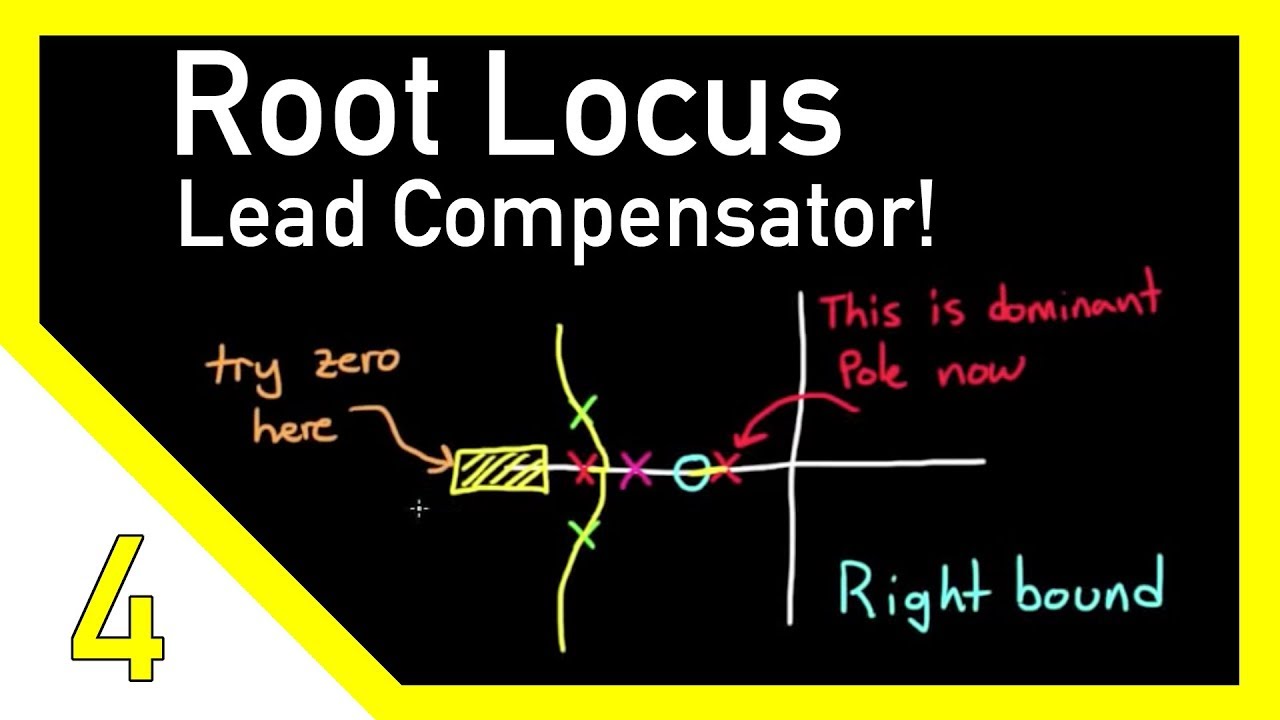
Designing a Lead Compensator with Root Locus

PID Tuning dengan Ziegler-Nichols (Seri PID Controller part2)

Praktikum Dasar Sistem Kendali - Unit 3

[Accounting Problem Solving Techniques] CVP Analysis - Sales Mix

Memahami PID Controller (seri PID Controller part1)
5.0 / 5 (0 votes)