🚗 Cómo HACER un ROBOT SEGUIDOR de LÍNEAS | Tutorial fácil
Summary
TLDREn este tutorial del canal 'vadechips', se presenta cómo construir un robot seguidor de líneas. El robot cuenta con una batería que alimenta un Arduino, un controlador de motores y dos motores, además de los sensores infrarrojo para detectar líneas negras. Se explica la estrategia de programación basada en cuatro escenarios de sensores, y se detalla el diagrama de conexiones y el código necesario para el funcionamiento del robot. El objetivo es que el robot siga una línea negra en un fondo blanco, ajustando la velocidad y dirección según las señales de los sensores. El video ofrece consejos para sintonizar la velocidad de los motores y asegurar que el robot se desvíe correctamente. Finalmente, se invita a la audiencia a seguir el proyecto en TikTok y a interactuar con el canal.
Takeaways
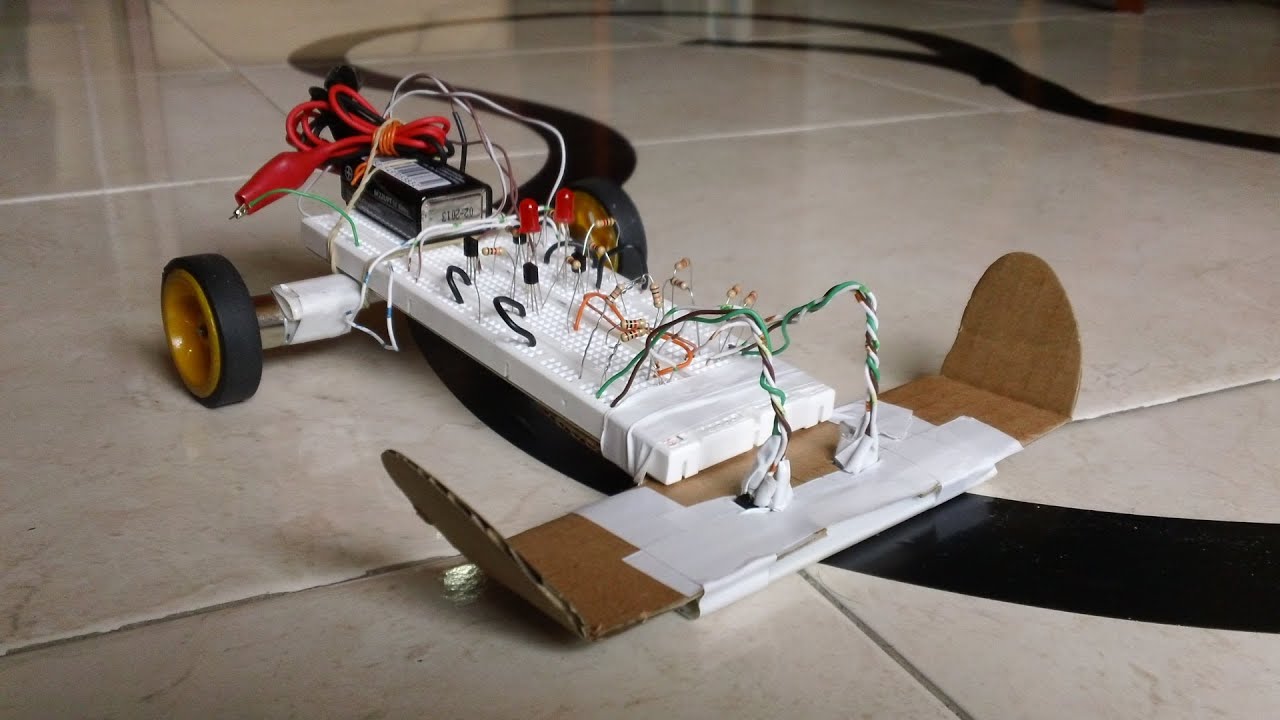
- 🔋 El robot seguidor de líneas tiene una batería que alimenta el circuito, los motores, el Arduino y el controlador de motores.
- 📏 El diseño incluye un Arduino, una protoboard pequeña, un controlador de motores de corriente continua y dos motores, uno para cada rueda.
- 👀 Los sensores infrarrojo de proximidad son usados para detectar líneas negras en el suelo.
- 📈 Se describe un diagrama de conexiones detallado para el proyecto del robot seguidor de líneas.
- 💡 La estrategia para el código del robot implica cuatro escenarios diferentes basados en la detección de línea negra o blanco por los sensores.
- 👉 Los sensores de infrarrojo se conectan a los pines digitales del Arduino y su señal indica si están sobre línea negra o blanco.
- 🛠️ Los pines de control de giro y enable de los motores están conectados a pines digitales del Arduino para su control.
- 🔧 Se establecen los pines de los sensores como inputs y los de los motores como outputs en la configuración inicial del código.
- 🔄 Se define una velocidad de 150 para los motores, pero se puede ajustar según sea necesario.
- 🔄 El código ejecuta una serie de condiciones para leer los valores de los sensores y controlar el movimiento del robot.
- 🎥 El creador del video invita a los espectadores a ver el proyecto en funcionamiento en su TikTok.
Q & A
¿Qué es el robot seguidor de líneas y qué hace?
-El robot seguidor de líneas es un dispositivo que sigue una línea negra en el suelo utilizando sensores infrarrojo de proximidad. Su función principal es moverse de manera autónoma siguiendo la trayectoria marcada por la línea.
¿Cuáles son las partes principales que componen el robot mostrado en el tutorial?
-Las partes principales incluyen una batería, un Arduino, una protoboard pequeña, un controlador de motores de corriente continua, dos motores para las ruedas, y sensores infrarrojo de proximidad.
¿Para qué sirve la batería en el robot seguidor de líneas?
-La batería sirve para alimentar todo el circuito, incluyendo tanto los motores como el Arduino y el controlador de motores.
¿Cómo se organizan los sensores infrarrojo en el robot?
-Los sensores infrarrojo de proximidad están ubicados en la parte superior del robot, uno en cada lado, para detectar las líneas negras del suelo.
¿Qué estrategia se sigue para desarrollar el código del robot seguidor de líneas según el tutorial?
-La estrategia consiste en manejar cuatro escenarios posibles basados en la lectura de los sensores infrarrojo: ambos sensores sobre la línea negra, el izquierdo sobre blanco y el derecho sobre la línea, el derecho sobre blanco y el izquierdo sobre la línea, y ambos sensores sobre blanco. Cada escenario dicta una acción diferente para el robot.
¿Cuáles son los cuatro escenarios posibles que se manejan en el código del robot?
-Los escenarios son: 1) Ambos sensores sobre la línea negra (parar el coche), 2) Sensor izquierdo sobre blanco y sensor derecho sobre la línea (girar hacia la derecha), 3) Sensor derecho sobre blanco y sensor izquierdo sobre la línea (girar hacia la izquierda), 4) Ambos sensores sobre blanco (seguir adelante).
¿Cómo se definen los pines de enable y control de giro de los motores en el código?
-Los pines de enable del motor A y B están conectados a los pines digitales 5 y 6 del Arduino y se utilizan para controlar la velocidad de los motores. Los pines de control de giro de los motores izquierdo y derecho también se definen en el código.
¿Qué tipo de señal envían los sensores infrarrojo al Arduino y por qué se configuran como inputs?
-Los sensores infrarrojo envían una señal que indica si están leyendo un fondo blanco o negro. Se configuran como inputs porque estos sensores envían señales al Arduino que indican su lectura actual.
¿Cómo se establece la velocidad de los motores en el código y qué rango puede tener?
-La velocidad de los motores se establece mediante una variable en el código que va desde cero a 255. En el tutorial, se define una velocidad de 150, pero se puede ajustar según sea necesario.
¿Cómo se soluciona si el robot no sigue una trayectoria recta y se desvía debido a diferencias en la velocidad de los motores?
-Si el robot se desvía debido a diferencias en la velocidad de los motores, se puede modificar la velocidad de uno de los motores para asegurarse de que ambos giren a la misma velocidad y el robot siga una trayectoria recta.
¿Qué acción se toma si los dos sensores de proximidad infrarrojo se encuentran sobre una línea negra?
-Si ambos sensores infrarrojo están sobre una línea negra, que puede representar una salida o la meta, se detiene el robot asignando a los pines digitales de los motores el estado Low.
Outlines

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードMindmap

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードKeywords

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードHighlights

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードTranscripts

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレード




5.0 / 5 (0 votes)
