Como Hacer El Robot Seguidor De Linea 💯% eficaz ✅
Summary
TLDREn este video tutorial, el creador muestra cómo construir un robot seguidor de línea que sigue una línea negra y se detiene ante colores distintos. Se detalla la lista de materiales, incluyendo LEDs rojos, resistencias, transistores 2N2222, una pila de 9 voltios, motores y sensores SN y 70. El proceso de ensamblaje en un protoboard, la conexión de sensores y LEDs a través de transistores y la configuración final del robot con motores se explican paso a paso. Además, se ofrecen consejos para solucionar problemas comunes y se muestra el robot funcionando en una pista.
Takeaways
- 🛠️ El video muestra cómo construir un robot seguidor de línea, que sigue una línea negra y se detiene al detectar otro color.
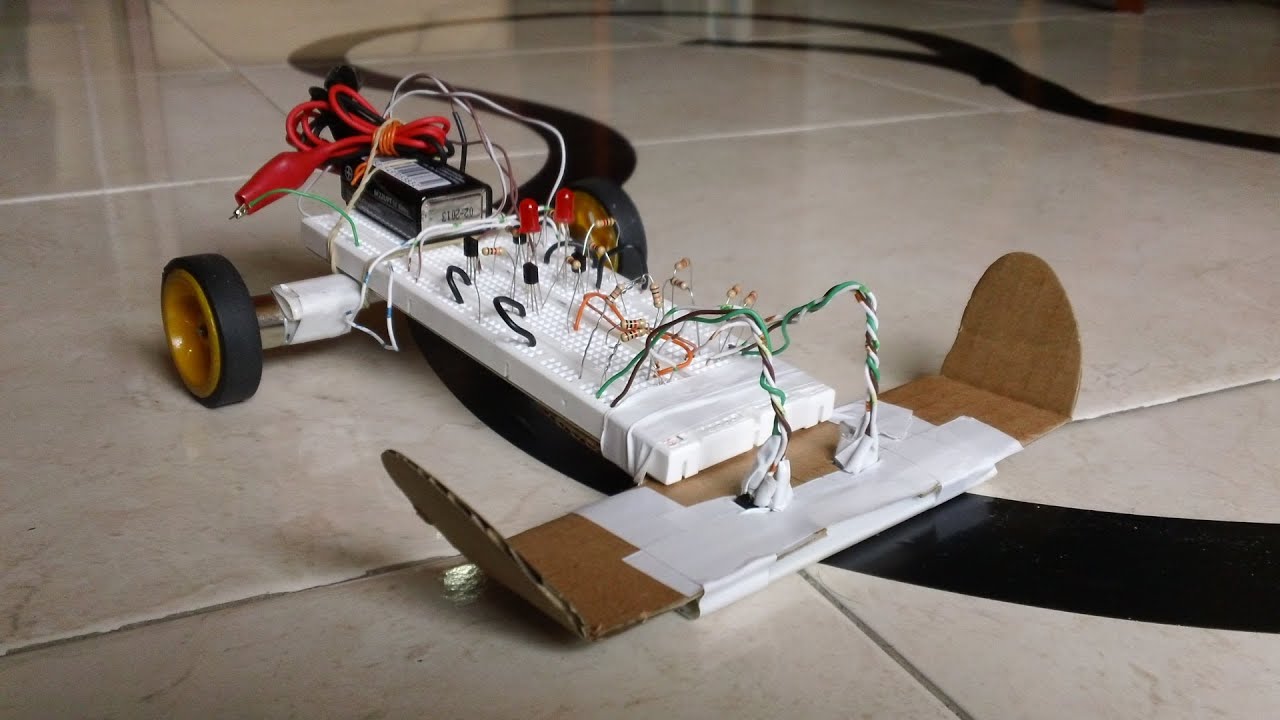
- 📋 Se necesitan materiales como un protoboard, LEDs rojos, resistencias, transistores 2N2222, una pila de 9 voltios, motores reductores, llantas, sensores SN y 70, y cable para la conexión.
- 🔍 Los sensores SN y 70 son cruciales para que el robot detecte la línea y el cambio de color.
- 🔌 Se describen detalladamente los pasos para conectar los sensores, resistencias y LEDs al protoboard.
- 🔧 Es importante utilizar cables de colores diferentes para evitar confusiones durante la conexión.
- 💡 Los LEDs indican el estado del sensor; se encienden o se apagan según la detección de la línea negra.
- 🔦 Se menciona que los sensores tienen un rango de detección de aproximadamente dos centímetros, pero un centímetro es la altura recomendada.
- 🔧 Los motores se conectan a los transistores, y se debe asegurar que los terminales estén correctamente soldados y fijos con silicona para evitar desconexión.
- 🔄 Se debe asegurar que los motores estén conectados en la polaridad correcta para que el robot avance en lugar de retroceder.
- 👁️ La altura y la posición de los sensores son cruciales para que el robot siga la línea correctamente y no se salga de la pista.
- 🔋 Finalmente, se conecta la pila y se verifica el funcionamiento del robot, asegurándose de que siga la línea negra y se detenga al detectar un color diferente.
Q & A
¿Qué es el robot seguidor de línea que se muestra en el video?
-El robot seguidor de línea es un pequeño carrito que sigue una línea negra y se detiene cuando detecta otro color diferente al negro.
¿Cuáles son los materiales necesarios para construir el robot seguidor de línea mencionado en el script?
-Los materiales necesarios incluyen un protoboard, 2 LEDs rojos, 6 resistencias de un k, 4 transistores 2n2222, una pila de 9 voltios, dos motores reductores, dos llantas, dos sensores SN y 70, dos resistencias de 20 k, dos resistencias de 560, y tres metros de cable.
¿Cómo se conectan los sensores SN y 70 en el robot seguidor de línea?
-Los sensores SN y 70 se conectan de tal forma que la pata con el círculo azul va a positivo y la pata con el círculo cristalino también a positivo, sin电阻ncia, y la pata debajo del círculo azul va a tierra con una resistencia de 560 ohmios.
¿Qué función cumplen las resistencias de 20 k y 560 ohmios en el circuito del robot?
-Las resistencias de 20 k van a tierra y son conectadas a la pata superior del círculo cristalino del sensor, mientras que las resistencias de 560 ohmios van a tierra y están conectadas a la pata inferior del círculo azul del sensor.
¿Cómo se conectan los transistores 2n2222 en el circuito del robot seguidor de línea?
-Los transistores 2n2222 se conectan de tal manera que la resistencia de un k va a la base del transistor, el emisor va a tierra sin resistencia y el colector va a positivo con una resistencia de un k.
¿Cuál es la función de los LEDs rojos en el robot seguidor de línea?
-Los LEDs rojos indican el estado del robot; si están encendidos, significa que los sensores están detectando la línea negra y el robot está funcionando correctamente.
¿Cómo se conectan los motores al circuito del robot seguidor de línea?
-Los colectores de los transistores se conectan a los terminales de los motores y los otros terminales de los motores van a positivo.
¿Qué sucede si el robot no sigue la línea negra y en su lugar va en reversa?
-Si el robot va en reversa en lugar de seguir la línea negra, se debe cambiar la polaridad de los cables conectados a los motores, intercambiando el cable que iba al transistor con el que iba a positivo.
¿Qué altura máxima deben tener los sensores para que el robot funcione correctamente?
-Los sensores deben tener una altura máxima de aproximadamente un centímetro para que el robot pueda detectar la línea negra que sigue.
¿Cómo se asegura que los motores no se desprenden fácilmente con el tiempo?
-Se recomienda soldar cables a los terminales del motor y luego cubrir los terminales con silicona para evitar que se desprendan con el tiempo debido a los movimientos del robot.
¿Cómo se verifica si el robot seguidor de línea está funcionando correctamente antes de la finalización del ensamblaje?
-Se puede verificar el funcionamiento del robot conectando temporalmente la pila y observando si los LEDs encendidos indican que los sensores están detectando la línea negra y si el robot reacciona adecuadamente al color distinto al negro.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantVoir Plus de Vidéos Connexes





5.0 / 5 (0 votes)
