Simulación de Sistemas de Control Usando Simulink
Summary
TLDREn este vídeo, se explica cómo simular sistemas de control utilizando Simulink en MATLAB. Se detalla cómo configurar un modelo en blanco, añadir una función de transferencia y un controlador P+I, y se ilustra con ejemplos cómo realizar simulaciones tanto al lazo abierto como cerrado. Además, se ofrecen trucos para visualizar gráficamente las respuestas y se invita a los espectadores a explorar más características de Simulink.
Takeaways
- 😀 Se presenta un tutorial para simular sistemas de control en Simulink, una herramienta de MATLAB.
- 🔄 Se busca simular un sistema de lazo cerrado con una función de transferencia y un controlador PI (proporcional-integral).
- 🛠️ Se explica que en Simulink, el controlador PI se representa de manera diferente a la forma estándar, utilizando una representación en lazo cerrado.
- 📈 Se detalla el proceso de configuración de la función de transferencia en Simulink, incluyendo los coeficientes del numerador y denominador.
- 🔧 Se muestra cómo se configura el controlador PI en Simulink, estableciendo la constante proporcional y la constante de tiempo integral.
- 🖥️ Se describe el uso de la biblioteca de elementos en Simulink para construir el modelo de forma gráfica.
- 📊 Se menciona cómo agregar un bloque de cambio escalón para simular la entrada y un 'scope' para visualizar los resultados.
- 🔄 Se explica cómo realizar una simulación al lazo abierto y cómo cambiar la entrada para experimentar con diferentes valores.
- 🔗 Se detalla el proceso de construir el lazo cerrado, incluyendo la adición de un operador de suma y la configuración del controlador.
- 📉 Se muestra cómo se simula el comportamiento del controlador PI en lazo cerrado y cómo se visualiza el desempeño del sistema.
- 📘 Se sugiere que Simulink es una herramienta práctica y visual para realizar simulaciones de sistemas de control.
Q & A
¿Qué herramienta de MATLAB se utiliza para simular sistemas de control según el vídeo?
-La herramienta de MATLAB utilizada para simular sistemas de control es Simulink.
¿Cuál es el objetivo principal del vídeo?
-El objetivo principal del vídeo es enseñar cómo simular un sistema de control lazo cerrado usando Simulink.
¿Qué tipo de controlador se discute en el vídeo para el sistema de control?
-Se discute un controlador proporcional integral derivativo (PID) en el vídeo.
¿Cómo se relacionan la constante proporcional y la constante de tiempo integral en el controlador PID en Simulink?
-En Simulink, la constante proporcional es igual a la constante proporcional del controlador PID estándar, y la constante de tiempo integral se relaciona con la constante derivativa multiplicándola.
¿Qué elemento de Simulink representa la función de transferencia en el modelo?
-El elemento de Simulink que representa la función de transferencia es el 'Transfer Function'.
¿Cómo se configura la función de transferencia en Simulink?
-Se configura la función de transferencia en Simulink dando doble clic en el elemento y especificando los coeficientes del numerador y denominador.
¿Qué elemento se utiliza para simular una señal de entrada en el sistema?
-Para simular una señal de entrada se utiliza el elemento 'Step' en Simulink.
¿Cómo se puede visualizar la salida del sistema en Simulink?
-Se puede visualizar la salida del sistema utilizando el elemento 'Scope' en Simulink.
¿Qué significa el 'set point' en el contexto del vídeo?
-El 'set point' es el valor objetivo o deseaado que se desea alcanzar en la simulación del sistema de control.
¿Cómo se configura el controlador PID en Simulink según el vídeo?
-Se configura el controlador PID en Simulink estableciendo los valores de las constantes proporcional e integral en el asistente del elemento 'PID Controller' y dejando la constante derivativa en 0 si no se utiliza.
¿Qué otro elemento de Simulink es útil para combinar señales y cómo se llama?
-El elemento de Simulink útil para combinar señales se llama 'Sum' y permite unir dos señales.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantVoir Plus de Vidéos Connexes
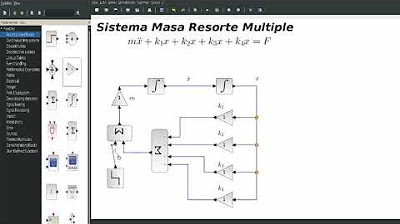
Simulación Sistema Masa Resorte Multiple XCos Part1
Motor de Corriente Continua: Funcionamiento y Tipos [Bien Explicado] 👌

ZIEGLER NICHOLS ✅ FIRST Method [PID Control] Part 1

✅ Subneteo VLSM y simulación en CiscoPacketTracer #1 📹 | Muy Facil | 👍
Modelado de Sistema Masa-Resorte-Amortiguador utilizando Laplace + Matlab Simulink

Laplace con matlab. Vídeo 5
5.0 / 5 (0 votes)
