✅ Black Line Follower Robot (How it's done)
Summary
TLDREn este video se explica cómo funciona un circuito seguidor de línea y cómo montar un robot que lo utilice. Se muestra cómo los sensores detectan la línea negra y ajustan la velocidad de los motores para mantener el robot en el camino. El circuito incluye transistores, resistencias y un motor de engranaje, con ajustes variables para controlar la velocidad. Se explica paso a paso el proceso de ensamblaje, desde la instalación del sensor hasta el ajuste de los motores para lograr un funcionamiento óptimo. Además, se invita a los espectadores a seguir el canal para más tutoriales sobre robótica.
Takeaways
- 😀 El robot seguidor de línea usa sensores para detectar la línea negra y ajustar la velocidad de los motores.
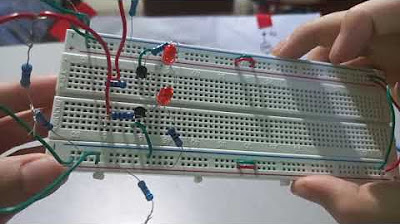
- 😀 Los sensores detectan la línea negra y activan o desactivan los LEDs según su presencia.
- 😀 El sensor CNY70 está conectado a un transistor 2N2222A que controla los motores del robot.
- 😀 El transistor 2N2222A tiene tres pines: base, emisor y colector, que se conectan a diferentes componentes del circuito.
- 😀 Un resistor de 1kΩ se utiliza para regular la corriente en el circuito del transistor.
- 😀 El motor del robot es controlado por el transistor y la resistencia variable de 50kΩ para ajustar la velocidad.
- 😀 Se utiliza un motor de engranaje con una fuerza mínima de 1 kg para asegurar que el robot pueda moverse correctamente.
- 😀 Cuando el sensor detecta la línea negra, el motor se enciende; cuando se desvía, se apaga y el motor opuesto sigue funcionando.
- 😀 Es importante ajustar la resistencia variable para evitar que el robot se mueva demasiado rápido o lento.
- 😀 El proceso de ensamblaje del robot es explicado en detalle en el video, que incluye tanto la parte del circuito como la mecánica.
- 😀 El video invita a los espectadores a darle 'like', suscribirse al canal y revisar más videos relacionados con el ensamblaje y funcionamiento del robot.
Q & A
¿Cuál es la función principal del robot seguidor de luz?
-La función principal del robot seguidor de luz es detectar una línea negra en el suelo usando sensores, y hacer que el robot siga esta línea ajustando la velocidad de los motores.
¿Cómo funciona el sensor en el robot seguidor de luz?
-El sensor detecta la línea negra y apaga un LED cuando pasa por encima de la línea. Cuando el sensor está sobre una superficie blanca, el LED se enciende, enviando una señal al circuito para activar o desactivar los motores.
¿Qué componentes clave forman el circuito del robot seguidor de luz?
-Los componentes clave del circuito incluyen el sensor CNY70, transistores 2N2222A, resistores de 1k, LEDs, un motor de engranaje y una resistencia variable de 50k para ajustar la velocidad.
¿Cuál es el propósito del transistor 2N2222A en el circuito?
-El transistor 2N2222A se utiliza para controlar el motor, funcionando como interruptor. El sensor envía una señal al transistor, que luego activa o desactiva el motor en función de la información recibida.
¿Por qué se utiliza una resistencia variable de 50k en el circuito?
-Se utiliza una resistencia variable de 50k para ajustar la velocidad del motor. Esto permite calibrar la velocidad del robot, especialmente si se mueve demasiado rápido o lento al seguir la línea.
¿Cómo se calibra la velocidad del motor en el robot seguidor de luz?
-La velocidad del motor se calibra ajustando la resistencia variable. Si el robot se mueve demasiado rápido o lento, se puede modificar esta resistencia o ajustar el sensor para obtener el rendimiento deseado.
¿Qué ocurre cuando el robot detecta la línea negra?
-Cuando el robot detecta la línea negra, el motor se activa, y el robot sigue la línea. Si el robot se desvía de la línea, el motor en el lado opuesto se detiene y el motor en el lado de la línea continúa para corregir la trayectoria.
¿Qué tipo de motor se recomienda utilizar para el robot seguidor de luz?
-Se recomienda usar un motor de engranaje con al menos 1 kg de fuerza, ya que esto asegura que el robot pueda moverse de manera efectiva y no se quede atrapado en el suelo.
¿Cómo afecta la ubicación de los motores al funcionamiento del robot seguidor de luz?
-Los motores deben estar ubicados en el lado opuesto al sensor. Esto permite que, si el robot se desvía de la línea, el motor en el lado contrario continúe funcionando, ayudando a corregir la trayectoria y devolver el robot a la línea.
¿Qué se debe hacer si el robot comienza a moverse demasiado rápido o demasiado lento?
-Si el robot se mueve demasiado rápido o lento, se debe ajustar la resistencia variable o el sensor para calibrar la velocidad y asegurar que el robot siga la línea correctamente.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraVer Más Videos Relacionados

ROBOT SEGUIDOR DE LINEA - ARDUINO UNO - PROYECTO COMPLETO
Como Hacer El Robot Seguidor De Linea 💯% eficaz ✅

🤯 Seguidor de Línea con ESP32 + Interfaz Web: ¡Monitoreo en Tiempo Real y Calibración FÁCIL!

🚗 Cómo HACER un ROBOT SEGUIDOR de LÍNEAS | Tutorial fácil

Circuito Rectificador De Onda Completa En la Protoboard

Increíble Robot Araña
5.0 / 5 (0 votes)