robot 12
Summary
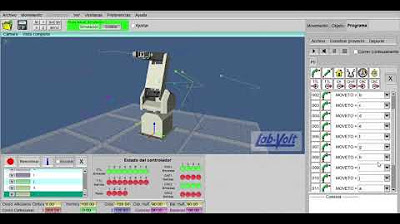
TLDREn este video, se explica cómo programar un robot para mover tres piezas del lado izquierdo al derecho. El programa sigue una secuencia lógica: el robot abre su pinza, toma una pieza, se eleva, la lleva al otro lado y la suelta, repitiendo este proceso hasta completar el traslado de las tres piezas. Cada paso es detallado, mostrando cómo se graban los puntos por los que el robot debe pasar y cómo se ejecuta la lógica del programa. Al final, se simula paso a paso el proceso, demostrando la simplicidad del código basado en una secuencia clara.
Takeaways
- 😀 El objetivo del programa es mover tres piezas de un lado a otro utilizando un robot.
- 🛠 El robot debe pasar cada pieza del lado izquierdo al lado derecho siguiendo una secuencia específica.
- 📍 Se mencionan puntos de referencia (A, B, C, etc.) que el robot debe recorrer para completar la tarea.
- 🤖 El robot inicia en una posición inicial y sigue un proceso lineal de tomar, transportar y soltar las piezas.
- ✋ La pinza del robot se abre y cierra para tomar y soltar las piezas respectivamente.
- 🔝 El robot se eleva para tomar y dejar las piezas, asegurando que no haya colisiones.
- 🔄 El proceso se repite tres veces, una para cada pieza, antes de que el robot regrese a su posición inicial.
- 🔚 Al final del programa, la pinza del robot debe estar abierta para indicar que la tarea ha concluido.
- 📝 El programa se ha programado teniendo en cuenta una secuencia lógica y se ha grabado en puntos para su ejecución.
- 🎥 Se ofrece una explicación paso a paso del programa y se sugiere una simulación para comprender mejor su funcionamiento.
Q & A
¿Cuál es el objetivo principal del programa descrito en el guion?
-El objetivo principal del programa es mover tres piezas de un lado (izquierdo) a otro lado (derecho) utilizando un robot.
¿Cómo se describe la secuencia de movimientos del robot en el guion?
-El robot comienza en la posición inicial, abre su pinza para tomar una pieza, se dirige a la pieza, cierra la pinza, se eleva, se desplaza al otro lado, abre la pinza para dejar la pieza y luego regresa a tomar la siguiente pieza, repitiendo el proceso hasta que todas las piezas están en el lado derecho.
¿Cuántas piezas debe mover el robot según el guion?
-El robot debe mover tres piezas.
¿Qué acciones específicas realiza el robot al tomar una pieza?
-El robot abre su pinza, se dirige a la pieza, cierra la pinza para tomarla, se eleva y se desplaza al lugar donde debe dejar la pieza.
¿Qué sucede después de que el robot deja la pieza en el lado derecho?
-Después de dejar la pieza, el robot abre la pinza para que la pieza caiga, se eleva de nuevo y regresa a tomar la siguiente pieza en el lado izquierdo.
¿Cómo se indica que el robot ha terminado de mover todas las piezas?
-El robot regresa a la posición inicial y cierra su pinza, lo que indica que ha terminado de mover todas las piezas.
¿Qué método se utiliza para grabar la secuencia de puntos que debe recorrer el robot?
-El guion no especifica el método exacto, pero menciona que los puntos han sido grabados y que el robot debe seguir una secuencia específica.
¿Cuál es la importancia de que el robot se eleve después de tomar y antes de dejar la pieza?
-El elevarse del robot es importante para evitar colisiones y asegurarse de que la pieza se pueda dejar en su lugar de destino sin problemas.
¿Cómo se simula el programa en el guion?
-El guion describe un proceso paso a paso de cómo se ejecutaría el programa, desde el inicio hasta el final, incluyendo la apertura y cierre de la pinza, el movimiento del robot y la colocación de las piezas.
¿Qué se debe hacer al final del programa para asegurar que el robot esté en su estado inicial?
-Al final del programa, el robot debe regresar a la posición inicial y cerrar su pinza para asegurarse de que esté en su estado inicial y listo para el siguiente ciclo o apagado.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahora




5.0 / 5 (0 votes)