como manejar cosimir parte 1
Summary
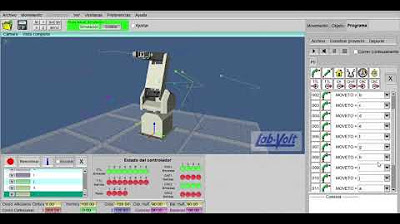
TLDREste video guía a los usuarios en el uso del programa Cosimir, mostrando cómo interactuar con un robot para realizar movimientos y manipular objetos. Se explica cómo configurar el programa, desde la creación de un nuevo proyecto hasta la selección del robot adecuado, y cómo realizar ajustes en las posiciones del robot utilizando diferentes modos (XYZ, modo de articulación, etc.). Además, se cubren los pasos básicos para programar movimientos, detectar errores y ajustar la programación, incluyendo cómo evitar colisiones y personalizar el movimiento del robot según las necesidades del usuario.
Takeaways
- 😀 El tutorial comienza con la introducción al software Cosimir, utilizado para controlar robots y realizar tareas como mover objetos.
- 😀 Se explica cómo crear un nuevo programa en Cosimir, destacando la importancia de escribir el nombre en minúsculas para evitar errores.
- 😀 El programa permite elegir el modelo de robot (como el RB 2J Apan 4) y configurar su entorno de trabajo.
- 😀 Se pueden mover las vistas y ajustar el robot en el espacio para preparar sus movimientos.
- 😀 Cosimir ofrece diferentes modos de movimiento: X, Y, Z (dirección general), modo de articulaciones y modo herramienta (para movimientos precisos).
- 😀 El modo X, Y, Z permite mover el robot hacia adelante, hacia atrás, arriba, abajo y de lado.
- 😀 El modo de articulaciones permite controlar partes específicas del robot como la cintura, el hombro y el codo.
- 😀 En el modo herramienta, el robot tiene una mayor aceleración, lo que facilita movimientos más rápidos y precisos.
- 😀 Para programar el robot, se deben especificar las coordenadas exactas de los movimientos (por ejemplo, X: 350, Y: 0, Z: 550).
- 😀 El proceso de compilación se usa para verificar si hay errores en el código antes de ejecutar el programa en el robot.
- 😀 Es fundamental verificar y corregir posibles colisiones entre el robot y otros objetos, utilizando las herramientas de detección de colisiones dentro de Cosimir.
- 😀 Al final del tutorial, el programador debe asegurarse de que el código esté bien estructurado y numerado para evitar errores y garantizar un funcionamiento adecuado.
Q & A
¿Qué es Cosimir y cómo se utiliza en el video?
-Cosimir es un programa creado para controlar un robot. En el video, se muestra cómo usarlo para mover un robot y realizar tareas específicas, como agarrar una caja y moverla.
¿Por qué es importante escribir el nombre del programa en minúsculas?
-Es importante escribir el nombre del programa en minúsculas para evitar errores, ya que Cosimir es educativo y puede marcar errores si el nombre se ingresa de otra forma.
¿Qué pasos se deben seguir para crear un nuevo programa en Cosimir?
-Primero, se debe poner el nombre en minúsculas, luego se asignan las iniciales del programador y el robot (en este caso, el RB 2J). Después, se finaliza el proceso y se inicia el programa.
¿Cómo se mueve el robot en Cosimir?
-El robot se puede mover utilizando tres modos: X, Y, Z, el modo de articulación (joint mode) y el modo de control de aceleración (TO mode). Estos modos permiten mover el robot en diferentes direcciones y con distintas velocidades.
¿Qué es el modo 'X, Y, Z' y cómo se usa?
-El modo 'X, Y, Z' permite mover el robot a lo largo de tres ejes: X (adelante y atrás), Y (lado a lado) y Z (arriba y abajo). Es útil para realizar movimientos precisos y crear figuras geométricas.
¿Qué diferencia hay entre el modo de articulación y el modo 'X, Y, Z'?
-En el modo de articulación, se controlan las partes específicas del robot, como la cintura, los hombros, los codos y las manos, mientras que el modo 'X, Y, Z' permite mover el robot en el espacio tridimensional.
¿Qué es el botón 'Cerrar mano' en Cosimir?
-El botón 'Cerrar mano' controla el agarre del robot, permitiendo cerrar la mano o el gripper para sujetar objetos.
¿Cómo se compila un programa en Cosimir?
-Para compilar un programa, primero se escriben los movimientos del robot y luego se hace clic en el botón de compilar. Si no hay errores en el código, el programa podrá ejecutarse y el robot realizará los movimientos programados.
¿Qué función cumple el botón de detección de colisiones?
-El botón de detección de colisiones ayuda a identificar posibles obstáculos en el camino del robot. Se activa para simular una comprobación de colisiones y evitar que el robot choque con objetos.
¿Qué se debe tener en cuenta al escribir el código en Cosimir?
-Es importante asegurarse de que las líneas de código estén numeradas en orden ascendente (por ejemplo, 10, 11, 12) para evitar errores durante la compilación. También se debe elegir el intervalo de numeración adecuado (como 1 por 1 o 2 por 2).
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade Now



5.0 / 5 (0 votes)
