#20 Race Conditions: What are they and how to avoid them?
Summary
TLDRIn this lesson of the Modern Embedded Systems Programming course, Miro Samek tackles race conditions—what they are, why they are dangerous, and how to avoid them. Using a practical example with GPIO LEDs and interrupts, Samek demonstrates how race conditions can occur when two pieces of code access a shared resource simultaneously. He discusses two strategies to eliminate race conditions: mutual exclusion using critical sections and avoiding shared resources altogether. The lesson highlights the importance of understanding and mitigating race conditions, especially in critical applications like safety systems, and explains how hardware design can aid in this process.
Takeaways
- 😀 The lesson focuses on understanding and addressing race conditions in embedded systems programming.
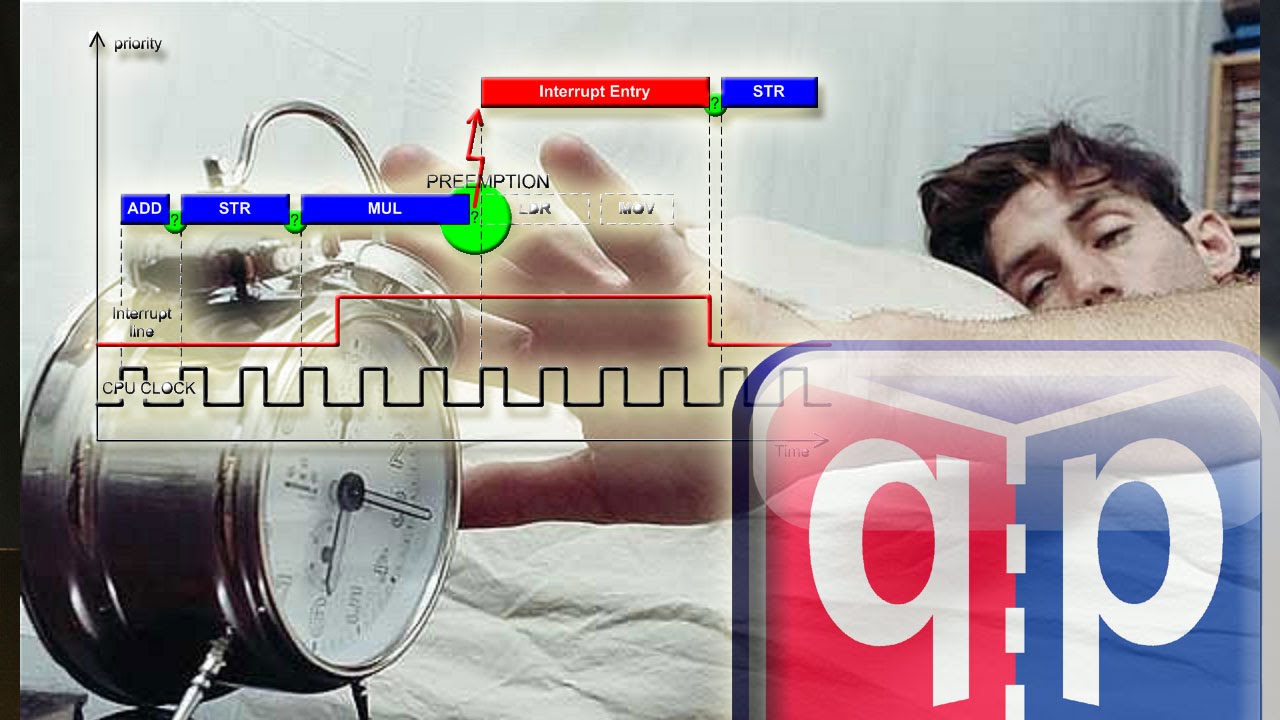
- 😀 A race condition occurs when two pieces of code preempt each other while accessing a shared resource, leading to unpredictable behavior.
- 😀 The issue was demonstrated using a Green and Blue LED toggling system, where the Blue LED blinked irregularly due to an interrupted sequence of operations.
- 😀 The primary danger of race conditions is that they lead to intermittent, hard-to-reproduce bugs that may escape to production, potentially causing catastrophic failures.
- 😀 One approach to solving race conditions is mutual exclusion, where only one piece of code is allowed to access a shared resource at a time.
- 😀 To implement mutual exclusion, interrupts can be disabled around critical sections of code, ensuring no preemption occurs during important operations.
- 😀 The `__disable_irq()` and `__enable_irq()` functions in C provide an efficient way to disable and enable interrupts without significant overhead.
- 😀 An alternative to using shared resources is to avoid sharing altogether. In the case of GPIO control, using separate registers for each GPIO bit (like `DATA_Bits`) eliminates the need for a read-modify-write sequence and prevents race conditions.
- 😀 The GPIO hardware was specifically designed to avoid race conditions by providing individual registers for each bit, thus ensuring atomic operations without interference.
- 😀 The lesson concludes by encouraging viewers to experiment with both mutual exclusion and the alternative of separate resource management to prevent race conditions in their embedded systems programming.
Q & A
What is a race condition in embedded systems programming?
-A race condition occurs when two or more pieces of code that can preempt each other access a shared resource in such a way that the result depends on the sequence of execution. This leads to unpredictable behavior and can cause bugs that are hard to reproduce and diagnose.
Why are race conditions dangerous in embedded systems?
-Race conditions can lead to intermittent bugs that are hard to reproduce and isolate. These bugs occur when code execution is preempted unexpectedly, which may cause serious issues, such as safety-critical systems malfunctioning. For example, in a nuclear reactor, a race condition could prevent a cooling system from activating properly, leading to catastrophic failure.
What is the specific issue that caused the race condition in the example with the TivaC LaunchPad?
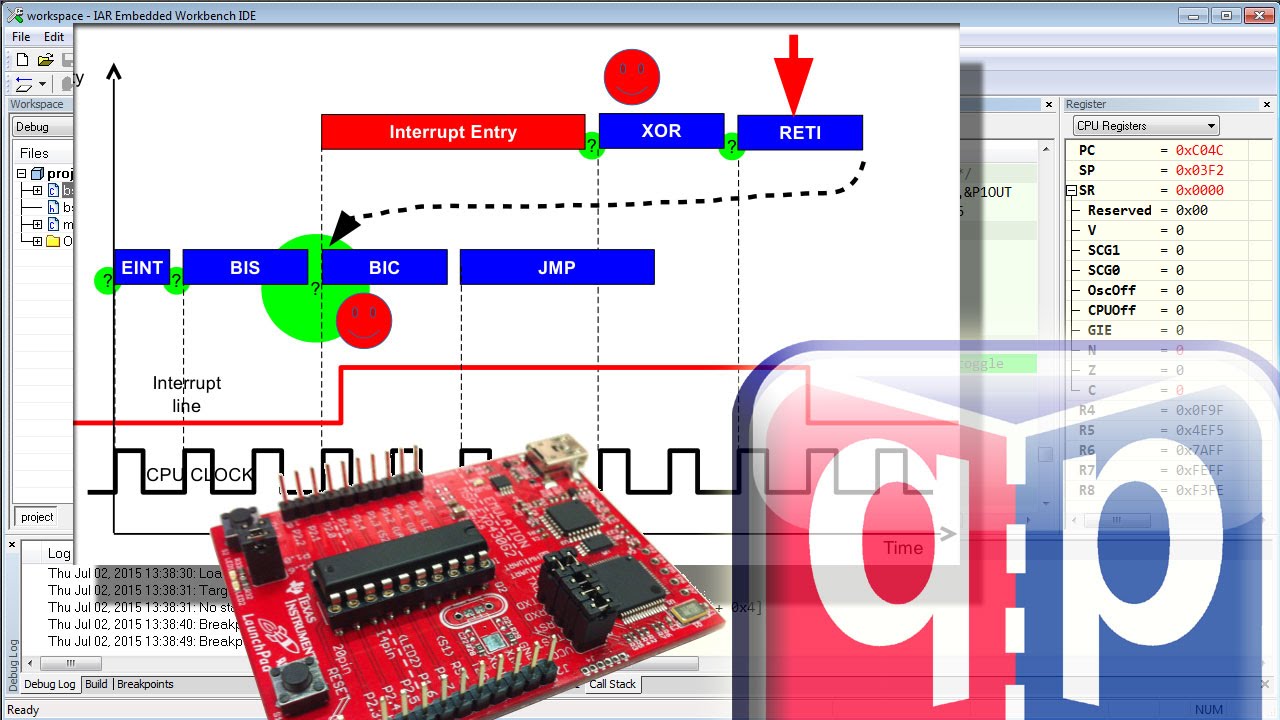
-In the example with the TivaC LaunchPad, the race condition occurred when the main code, which was controlling the Green LED, was interrupted by the SysTick interrupt that controlled the Blue LED. This caused the Green LED's bit to be cleared after the interrupt had already modified the GPIO register, which led to both LEDs turning off unexpectedly.
How can race conditions be prevented using mutual exclusion?
-Mutual exclusion can be implemented by ensuring that only one piece of code accesses a shared resource at a time. In the example, this can be done by disabling interrupts around critical code sections (such as modifying the GPIO register) to prevent preemption by other code, such as the SysTick interrupt.
What are critical sections in the context of embedded systems?
-A critical section is a part of the code where access to shared resources is serialized to ensure mutual exclusion. In embedded systems, this typically involves disabling interrupts before accessing shared hardware resources, thus preventing race conditions during that time.
What is the significance of using the __disable_irq() and __enable_irq() functions?
-The __disable_irq() and __enable_irq() functions are used to disable and enable interrupts, respectively, around critical sections of code. These functions allow for efficient, low-overhead control of interrupt handling, ensuring that critical sections are not preempted and that shared resources are accessed safely.
How does the hardware design of the GPIO registers help prevent race conditions?
-The GPIO registers in the TivaC LaunchPad are designed to avoid race conditions by providing separate registers for each GPIO bit. This design eliminates the need for shared access to a common data register, thus avoiding the need for read-modify-write sequences and reducing the chance of race conditions.
What is the difference between using the GPIO DATA register and the GPIO DATA_Bits array?
-The GPIO DATA register controls all the bits of the GPIO port, requiring read-modify-write operations to set or clear individual bits. In contrast, the GPIO DATA_Bits array provides a separate register for each GPIO bit, allowing direct atomic access to individual bits without the risk of modifying other bits, thus avoiding race conditions.
Why is the 'read-modify-write' sequence a problem in the context of race conditions?
-The 'read-modify-write' sequence is problematic because it involves reading the value of a register, modifying it, and then writing it back. If an interrupt occurs between the read and write operations, the modified register value may be overwritten by the interrupt, leading to inconsistent or incorrect results, as seen in the TivaC LaunchPad example.
What is the primary benefit of using a separate register for each GPIO bit instead of a shared register?
-The primary benefit is that each GPIO bit can be accessed independently and atomically, without the need for a 'read-modify-write' sequence. This design avoids shared resource access and eliminates race conditions, ensuring more predictable and reliable operation of embedded systems.
Outlines

此内容仅限付费用户访问。 请升级后访问。
立即升级Mindmap

此内容仅限付费用户访问。 请升级后访问。
立即升级Keywords

此内容仅限付费用户访问。 请升级后访问。
立即升级Highlights

此内容仅限付费用户访问。 请升级后访问。
立即升级Transcripts

此内容仅限付费用户访问。 请升级后访问。
立即升级浏览更多相关视频
#17 interrupts Part-2: How most CPUs (e.g. MSP430) handle interrupts?

#8 Functions in C and the call stack
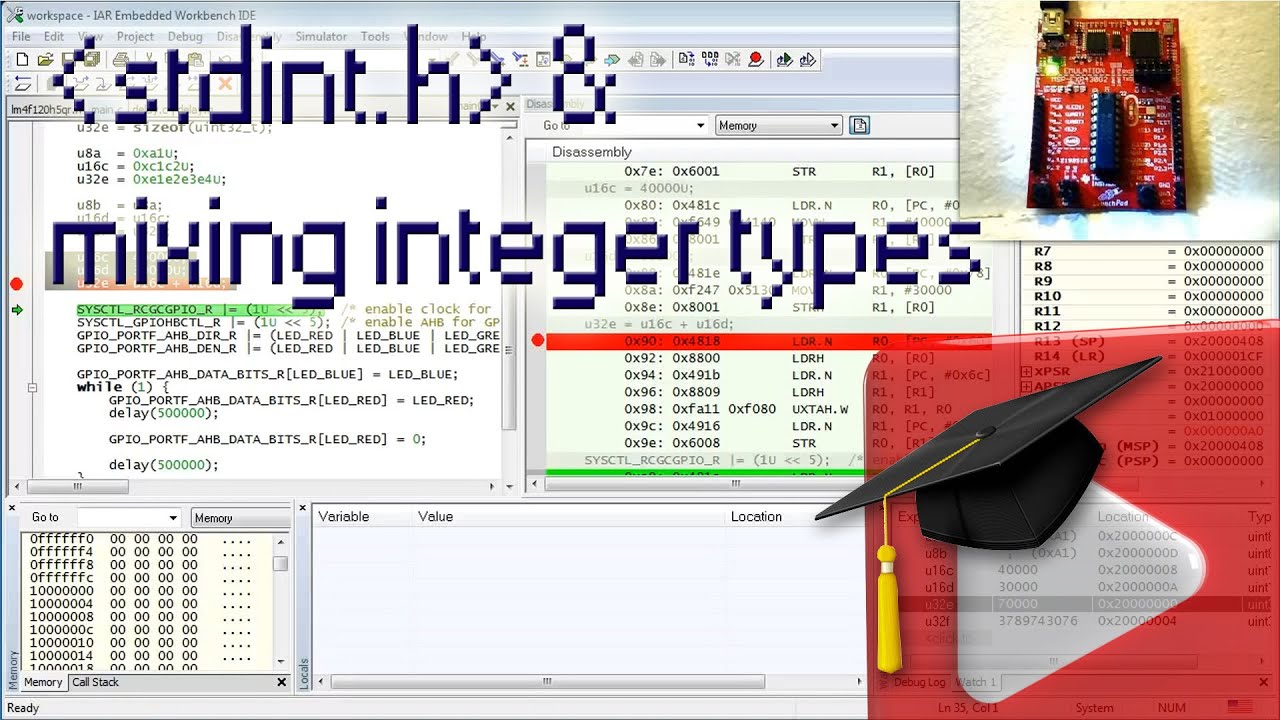
#11 Standard integers (stdint.h) and mixing integer types
#16 Interrupts Part-1: What are interrupts, and how they work

#2 How to change the flow of control through your code
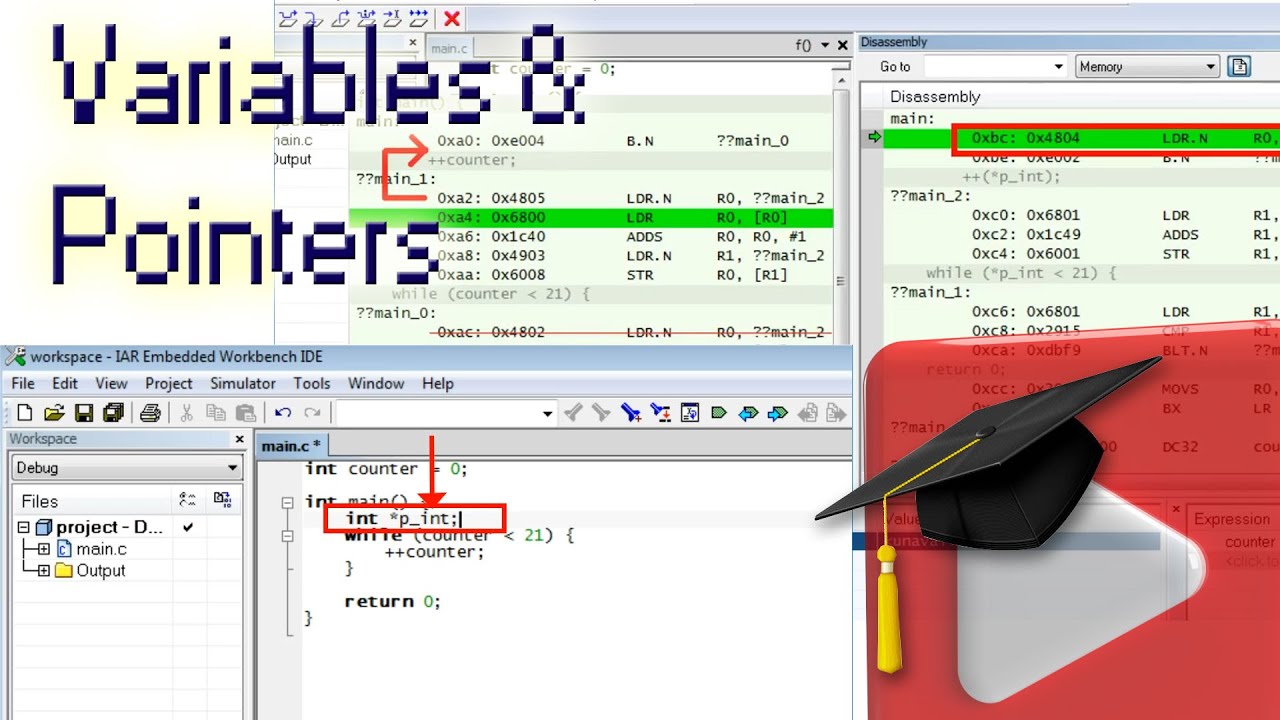
#3 Variables and Pointers
5.0 / 5 (0 votes)
