Lecture 15: Robot Kinematics (Contd.)
Summary
TLDRThis video explains the Denavit-Hartenberg (DH) notation, which is used to describe the position and orientation of robotic manipulator end-effectors in a fixed coordinate system. The script covers the assignment of coordinate systems at each joint using DH rules, introducing key parameters like link and joint parameters. The link parameters (such as the length and angle of twist of the link) and joint parameters (like offset and joint angle) are defined. The video also discusses the process of assigning axes for each joint and using transformations to calculate the position and orientation of the end-effector. This explanation lays the foundation for understanding manipulator kinematics and robot design.
Takeaways
- 😀 Denavit-Hartenberg notation is used to assign coordinate systems to the joints of a serial manipulator for determining the position and orientation of its end-effector.
- 😀 Link parameters represent the structure of a link and joint parameters describe the relative position between neighboring links.
- 😀 The length of a link, denoted by a_i, is the mutual perpendicular distance between the axes of consecutive joints.
- 😀 The angle of twist (α_i) represents the angle between the axes of two consecutive joints and can be positive, negative, or zero.
- 😀 The joint parameters include link offset (d_i) and joint angle (θ_i), where d_i measures the distance between the axes and θ_i represents the rotation angle between them.
- 😀 For a revolute joint, θ_i is the variable, while for a prismatic joint, d_i is the variable.
- 😀 The Z-axis is determined by the axis of rotation (for revolute joints) or the axis of translation (for prismatic joints).
- 😀 When the Z-axes of two consecutive joints are parallel, the X-axis is chosen along their common normal.
- 😀 Special cases exist where the Z-axes of two joints intersect or are collinear, in which case the X-axis can be chosen in various directions.
- 😀 The Y-axis is determined using the cross product of the Z and X axes, ensuring the right-handed coordinate system.
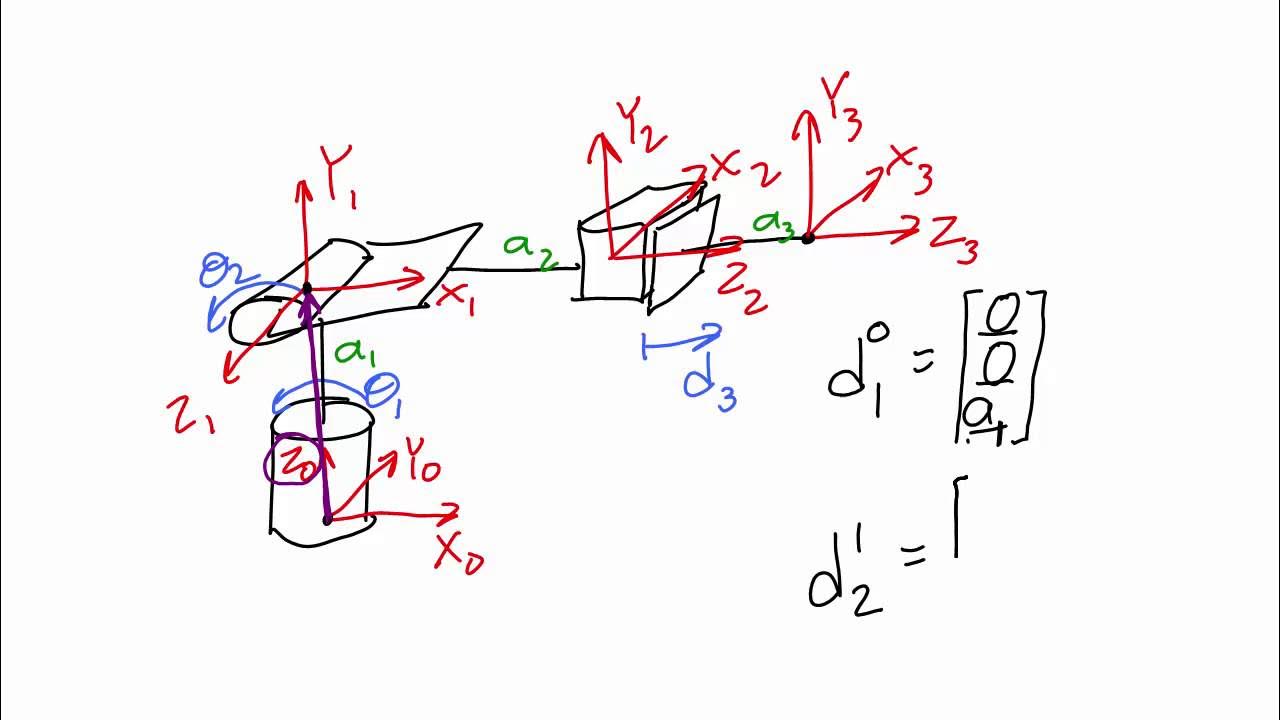
- 😀 The transformation matrix (T_i with respect to T_(i-1)) is determined through a series of rotations and translations, starting from the previous joint's frame to the current joint's frame.
Q & A
What is the purpose of assigning coordinate systems at different joints in a serial manipulator?
-The purpose is to determine the position and orientation of the end-effector with respect to a fixed coordinate system. By assigning coordinate systems at different joints, we can calculate the transformation and the final position of the end-effector.
What are the Denavit-Hartenberg (DH) notation rules?
-The Denavit-Hartenberg notation is a set of rules used to assign coordinate systems to different joints in a robotic arm. These rules, proposed in 1955, simplify the process of calculating the position and orientation of the end-effector by breaking it down into manageable transformations between adjacent links.
What are the two types of parameters defined for describing robotic joints, and what is their purpose?
-The two types of parameters are link parameters and joint parameters. Link parameters describe the structure of a link, such as its length and twist. Joint parameters describe the relative position of neighboring links, including the offset and angle of rotation.
What is the definition of the length of a link in DH notation?
-The length of a link (denoted by a_i) is the mutual perpendicular distance between two consecutive axes of rotation, specifically between axis_i-1 and axis_i. It represents the physical length of the link between two joints.
How is the angle of twist (alpha_i) defined in DH notation?
-The angle of twist (denoted by alpha_i) is the angle between two consecutive axes of rotation, axis_i-1 and axis_i. It is measured from axis_i-1 to axis_i and indicates the rotational difference between the axes.
What is the joint offset (d_i) in DH notation?
-The joint offset (denoted by d_i) is the distance between the two points where axis_i-1 and axis_i intersect the respective planes. It represents the translation along the Z-axis between two consecutive links.
How is the joint angle (theta_i) defined for a revolute joint?
-The joint angle (denoted by theta_i) is the angle between the extension of link a_i-1 and link a_i, measured about axis_i-1. For a revolute joint, theta_i is the variable that changes during rotation.
What is the difference in behavior between a revolute joint and a prismatic joint in terms of DH parameters?
-For a revolute joint, the joint angle (theta_i) is the variable, while the link parameters a_i, alpha_i, and d_i remain constant. For a prismatic joint, the link offset (d_i) is the variable, while the joint angle (theta_i), the link length (a_i), and the twist angle (alpha_i) remain constant.
What is the process for assigning the Z_i axis in DH notation?
-The Z_i axis is assigned along the axis of rotation for a revolute joint or along the axis of translation for a prismatic joint. It defines the direction along which movement occurs in either a rotational or translational motion.
What happens when Z_i-1 and Z_i axes are parallel or intersect in DH notation?
-When Z_i-1 and Z_i axes are parallel, the X_i axis is directed along their common normal. When the Z_i-1 and Z_i axes intersect, the X_i axis can be selected in either of the two remaining directions. In cases where the axes are collinear, the X axis is selected in a plane perpendicular to them.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video

Introducción a la robótica: Posición, orientación y tramas

Tata Koordinat Ekuatorial

Fatty Acid Nomenclature | Part 3 Lipid Foundations | Macronutrients Lecture 69

Position, Displacement, and Distance - Nerdstudy Physics

Rectangular, cylindrical, and spherical coordinates (introduction & conversion)
1 1 4 Lecture Video 1 of 2 Displacement Vectors
5.0 / 5 (0 votes)