Robótica: Denavit-Hartenberg
Summary
TLDREl script ofrece una explicación detallada sobre cómo resolver la cinemática y dinámica de un brazo robótico utilizando el sistema de referencia de Denavit-Hartenberg. Se discute la numeración de articulaciones, la identificación de variables como ángulos y distancias de desplazamiento, y cómo se aplican en el modelado de cinemática directa. El objetivo es simplificar el proceso de cálculo para entender y programar el movimiento del brazo robótico. Se sugiere que los espectadores proporcionen comentarios y ejemplos para futuras sesiones más complejas, destacando la importancia de esta metodología en la programación y el cálculo de fuerzas en robots.
Takeaways
- 🤖 El script trata sobre cómo resolver la cinemática y dinámica de un brazo robótico utilizando el sistema de referencia de Denavit-Hartenberg.
- 📐 Se menciona que este sistema opera con dos ejes de coordenadas para cada articulación, facilitando los cálculos.
- 🔍 El objetivo es presentar un método intuitivo para entender y aplicar el sistema de referencia en la cinemática directa de un brazo robótico.
- 👨🏫 Se sugiere que, aunque hay recursos disponibles en línea, el video busca resolver de forma sencilla el problema de la atención de este sistema de referencia.
- 🔧 Se describe un modelo de robot con cuatro articulaciones rotatorias y se explica cómo numerarlas para facilitar el modelado.
- 📏 Se explica que para el modelado de cinemática directa se utilizan cuatro parámetros de configuración, incluyendo variables y constantes.
- 📐 Se detalla el proceso de definir el sistema de referencia para la base y las articulaciones, incluyendo la orientación de los ejes de coordenadas.
- 🔄 Se discute la necesidad de realizar rotaciones y traslaciones para alinear los ejes de coordenadas de cada articulación con el modelo físico.
- 📝 Se enfatiza la importancia de calcular correctamente los ángulos (alfa) y las distancias (a, d) para cada articulación.
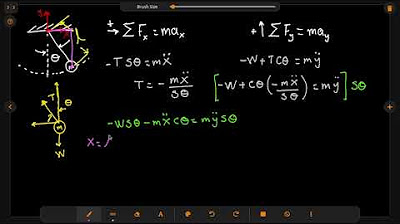
- 🔧 Se sugiere que el uso del algoritmo de Denavit-Hartenberg ayuda a simplificar el cálculo de las fuerzas en la dinámica del brazo robótico.
- 📚 Se invita a los espectadores a dejar comentarios y sugerencias para mejorar el contenido del video y se menciona que se puede abordar modelos más complejos en futuras sesiones.
Q & A
¿Qué representa la notación de Denavit-Hartenberg y cómo se utiliza en la cinemática y dinámica de un brazo robótico?
-La notación de Denavit-Hartenberg es una convención utilizada para describir la cinemática y dinámica de un brazo robótico. Se compone de cuatro parámetros de configuración para cada articulación: dos variables (ti, d_i) que representan el ángulo de rotación y la distancia de traslación, respectivamente, y dos constantes (a_i, α_i) que representan la distancia y el ángulo fijos entre ejes de coordenadas consecutivos.
¿Por qué es importante numerar las articulaciones en un modelo de brazo robótico?
-Numerar las articulaciones es una práctica recomendable que ayuda a identificar y definir claramente los elementos que intervienen en el modelo del brazo robótico. Facilita la referencia y el seguimiento de cada articulación durante el análisis cinemático y dinámico.
¿Cuál es el primer paso para configurar el sistema de referencia del brazo robótico según el script?
-El primer paso para configurar el sistema de referencia es numerar cada una de las articulaciones, comenzando con la base numerada como 0 y luego las articulaciones 1, 2, 3 y 4, para identificar claramente los elementos del modelo.
¿Qué es la cinemática directa y cómo se relaciona con las transformaciones en un brazo robótico?
-La cinemática directa es el proceso de determinar la posición y orientación del finalizador (por ejemplo, la pinza) de un brazo robótico a partir de los ángulos de articulación. Se relaciona con las transformaciones en que se utilizan para calcular la posición del finalizador a través de las articulaciones del brazo.
¿Qué tipo de articulaciones se mencionan en el script para el modelo del brazo robótico?
-El script menciona que todas las articulaciones en el modelo del brazo robótico son rotatorias, lo que significa que giran en torno a un eje.
¿Cómo se define el sistema de referencia para la base del brazo robótico en el script?
-El sistema de referencia para la base se define colocando el eje z vertical hacia arriba, el eje x horizontal hacia la derecha y el eje y en el plano perpendicular al papel, con z apuntando hacia adentro del papel.
¿Qué significa 'ti' y 'd_i' en el contexto de la notación de Denavit-Hartenberg?
-En la notación de Denavit-Hartenberg, 'ti' representa el ángulo de rotación de la articulación i, mientras que 'd_i' representa la distancia de traslación entre el eje z de la articulación i-1 y el eje z de la articulación i.
¿Cuáles son las dos constantes o valores fijos que se utilizan en la notación de Denavit-Hartenberg para cada articulación?
-Las dos constantes o valores fijos en la notación de Denavit-Hartenberg son 'a_i', que es la distancia fija entre el eje z de la articulación i-1 y el eje x de la articulación i, y 'α_i', que es el ángulo de rotación fijo entre los ejes z de las articulaciones i-1 y i.
¿Cómo se determina el primer eje de coordenadas para la primera articulación en el proceso descrito en el script?
-Para determinar el primer eje de coordenadas para la primera articulación, se duplica el eje de coordenadas de la base y se sitúa en la posición del elemento 1, asegurándose de que el eje z esté en la misma dirección que la rotación de la articulación.
¿Qué implica la rotación del eje x en el proceso de configuración del sistema de referencia para el brazo robótico?
-La rotación del eje x implica ajustar el sistema de referencia para que el eje x esté paralelo al plano formado por los ejes z de las articulaciones. Esto se logra girando el eje x en un ángulo de 90 grados alrededor del eje z para que el eje x esté correctamente alineado con el plano del brazo robótico.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade Now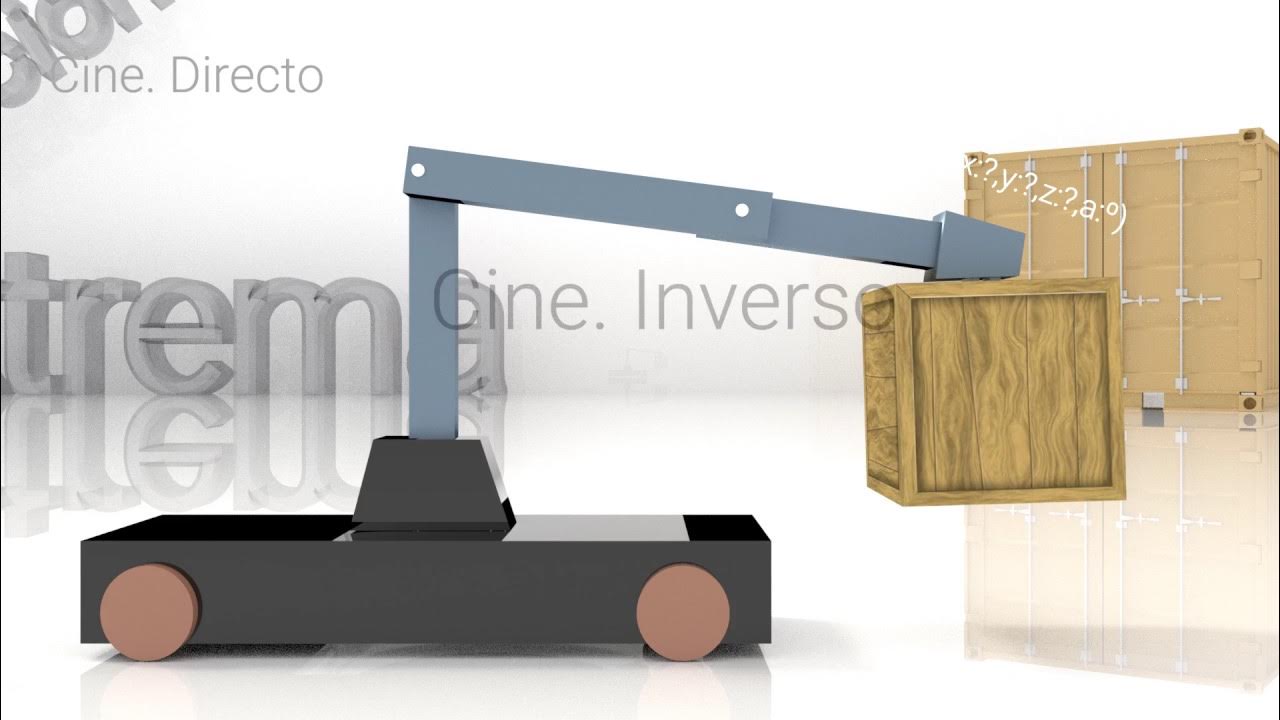



5.0 / 5 (0 votes)
