DIY Pakan Kucing Otomatis sederhana dengan Arduino dan servo (Auto Feeder Sederhana)
Summary
TLDRIn this video, Dedy Setiadi demonstrates how to create a simple automated pet feeder using an Arduino and a servo motor. The project involves basic components like an Arduino Uno, a mini servo motor, and some simple wiring. The servo opens and closes a feeder, dispensing food for pets like cats or fish. The tutorial covers both the hardware setup and the Arduino coding required for the system. Viewers can customize the project by adding features like a real-time clock or sensors to monitor food levels. The design is adaptable for different pets and can be easily modified for various needs.
Takeaways
- 😀 A simple automatic pet feeder can be created using an Arduino and a mini servo motor.
- 😀 The servo motor is used to open and close a feeding door, dispensing food for pets like cats, fish, or birds.
- 😀 Arduino Uno is used in this project, but other Arduino boards can also be used with minimal modifications to the code.
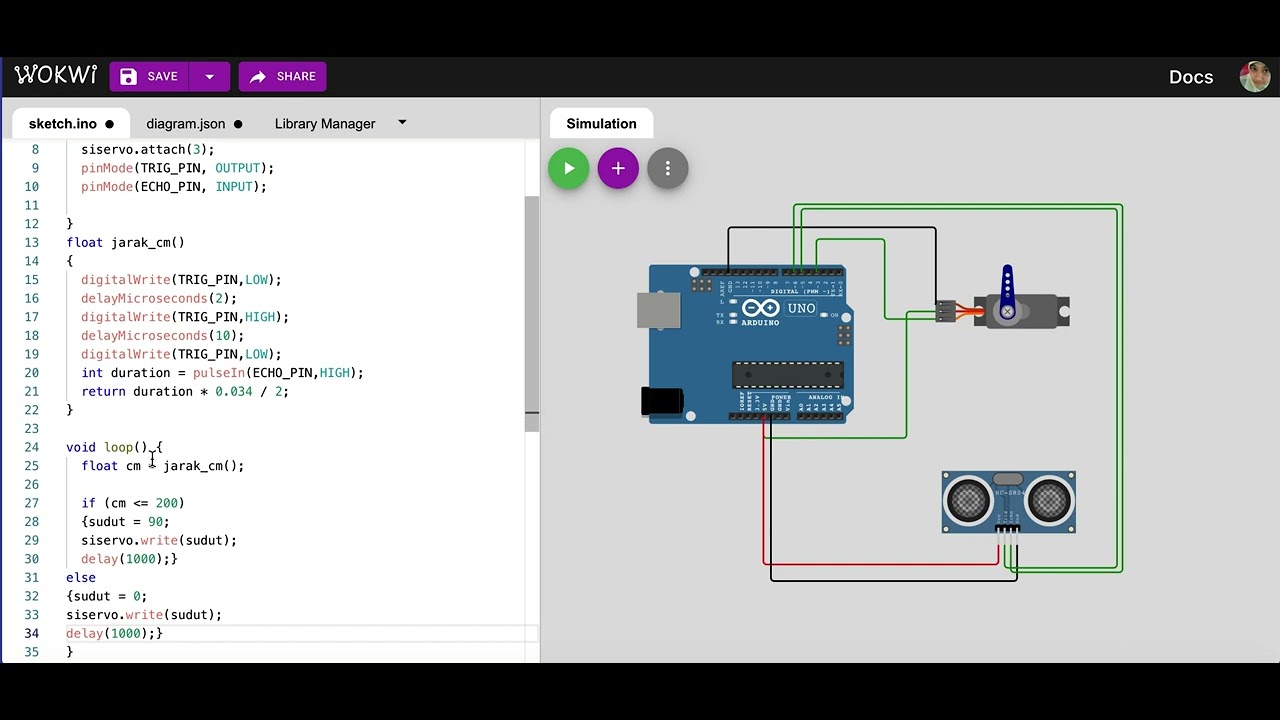
- 😀 The wiring for the servo motor involves three wires: yellow for signal (connected to pin 9), red for power (connected to 5V), and brown for ground (connected to GND).
- 😀 The servo motor's angle can be adjusted (e.g., 0° for closed and 180° for open) to control the amount of food dispensed.
- 😀 A simple coding structure is used to command the servo to rotate between 0° and 180°, with delays to control the dispensing time.
- 😀 The Arduino sketch uses the Servo library to control the servo motor, making the setup and programming straightforward.
- 😀 For more advanced functionality, an RTC module can be added to schedule feeding times, and a timer can be used for time-based feeding intervals.
- 😀 Optional sensors like an ultrasonic sensor can be used to detect food levels in the dispenser and trigger notifications when the food is running low.
- 😀 The servo and food dispenser design is simple, with a flexible string or fishing line used to return the door to its closed position, preventing jamming and damage to the motor.
Q & A
What is the main goal of the project in the video?
-The main goal of the project is to create an automated pet feeder using an Arduino and a servo motor. This system is designed to open and close a food compartment to dispense food for pets like cats, birds, or fish.
What components are used to build the automatic pet feeder?
-The project uses an Arduino Uno, a small servo motor, some wiring, and a food dispenser. The servo motor is the primary actuator, controlled by the Arduino to open and close the food compartment.
How is the servo motor connected to the Arduino?
-The servo motor is connected to the Arduino using three wires: the yellow wire (signal) is connected to a digital pin (e.g., pin 9), the red wire (positive) is connected to the 5V power supply, and the brown wire (negative) is connected to the ground.
Why is pin 9 used for controlling the servo motor?
-Pin 9 is used for controlling the servo motor because it is one of the standard pins commonly used in Arduino tutorials. However, any available digital pin can be used as long as the pin is correctly initialized in the code.
How does the Arduino control the servo motor in the feeder project?
-The Arduino uses the servo control library to send commands to the servo motor. In the code, the servo is instructed to rotate between 0° (closed) and 180° (open), with delays in between to allow food to be dispensed.
What kind of food can be dispensed with this automated feeder?
-The feeder can be used for dispensing food for various pets, including cats, birds, or fish. The design can be customized based on the type of pet food and dispenser used.
Can the timing of the feeder's operation be customized?
-Yes, the timing can be customized. While the project in the video does not use a Real-Time Clock (RTC), the timing of the feeder can be set using a timer. For more precise feeding times, an RTC module can be added to automate feeding at specific times of the day.
What adjustments were made to the mechanical design during the project?
-The presenter used a flexible fishing line and rubber bands to ensure smooth operation of the food dispenser. This approach helps to reset the compartment after dispensing food and reduces strain on the servo motor. The design was also adjusted to prevent food particles from getting stuck, especially with larger pet food.
What challenges were faced when dispensing larger pet food?
-The main challenge was that larger pieces of pet food, such as for cats, would get stuck in the dispenser and prevent smooth operation. The solution was to make the opening of the dispenser larger and use more flexible materials like fishing line to avoid damaging the servo motor.
How could the project be further improved or customized?
-The project could be improved by integrating sensors like an ultrasonic sensor to monitor the food level. This would allow the feeder to detect when the food is running low and trigger a notification, such as a buzzer or sound, to alert the user. Additionally, the RTC module could be added for precise feeding schedules.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video

handsanitizer otomatis menggunakan arduino UNO R3 CH340. baca deskripsi ya

[ Projek Y EE 014 ] Diy Automatic Dustbin || Arduino Nano || Ultrasonic Sensor || Servo Motor

Project Membuat Palang pintu otomatis Jalan tol
Simulasi kontrol gerakan servo dengan sensor ultrasonik | mikrokontroler arduino di wokwi.com

DIY hand sanitizer automatic dispenser infrared & servo

DIY Automatic Door System with Ultrasonic Sensor & Servo Motor! 🚪🤖 (Live Demo)
5.0 / 5 (0 votes)