8.2. Rotational Kinematics
Summary
TLDRThis transcript explains the fundamentals of rotational kinematics, focusing on deriving the kinematic equations for motion under constant angular acceleration. It demonstrates how the rotational motion equations mirror their translational counterparts by substituting linear parameters with their rotational equivalents. The video also provides problem-solving strategies for rotational kinematics, emphasizing the importance of unit consistency and the concept of rolling without slipping. The key takeaway is that the principles for solving rotational motion problems are nearly identical to those for translational motion, with just a few adjustments for angular variables.
Takeaways
- 😀 Motion under constant angular acceleration follows equations similar to translational motion, with angular velocity (ω), angular acceleration (α), and angular displacement (θ) replacing linear counterparts.
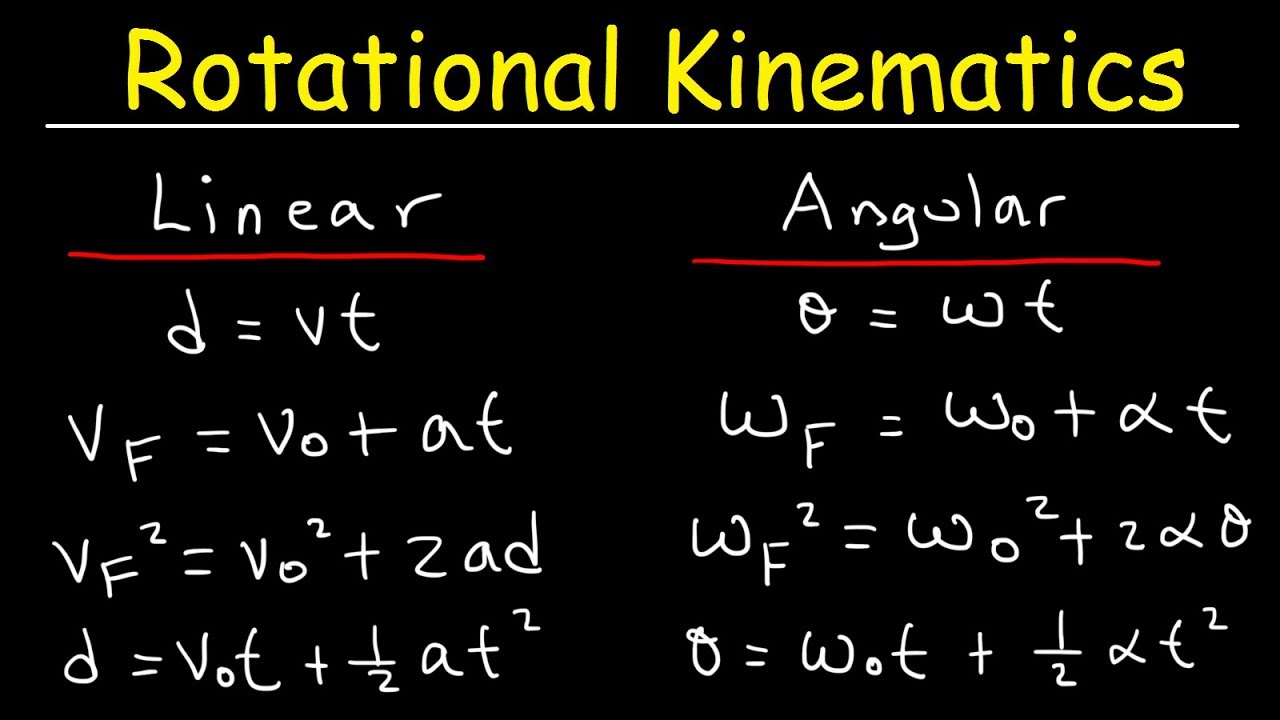
- 😀 The basic kinematic equations for rotational motion are derived by simply replacing translational variables with their rotational equivalents, such as replacing 'x' with θ and 'v' with ω.
- 😀 To solve rotational motion problems, follow the same procedure as for translational motion: identify given and unknown parameters, choose the appropriate equation, and solve for the unknown.
- 😀 Unit consistency is critical in rotational motion problems. Always ensure that angular velocity, angular acceleration, and angular displacement are in radians, radians per second, and radians per second squared, respectively.
- 😀 The three primary rotational kinematic equations under constant angular acceleration are: ω = ω_0 + αt, θ = θ_0 + ω_0t + 1/2 αt^2, and ω^2 = ω_0^2 + 2α(θ - θ_0).
- 😀 Rolling without slipping is a key concept in rotational dynamics where the velocity of the center of mass (v_cm) equals the tangential velocity at the point of contact, with the condition v_cm = r ω.
- 😀 Static friction is essential for rolling without slipping. If there is sufficient static friction, rolling can occur without any slippage at the point of contact with the surface.
- 😀 When solving problems involving rolling without slipping, the velocity of the center of mass is equal in magnitude and opposite in direction to the velocity at the point of contact with the surface.
- 😀 The general approach to solving rotational kinematics problems is to first read the problem carefully, identify the object, and determine the parameters that are given and those that need to be solved for.
- 😀 Use diagrams to help visualize the problem. For rolling objects, draw the center of mass and indicate the point of contact with the surface, which will be key to applying the rolling without slipping condition.
- 😀 The procedure for solving rotational kinematics problems is essentially the same as for translational problems, with the only difference being that the parameters are now represented with Greek letters (like θ, ω, and α).
Please replace the link and try again.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video
Angular Motion and Torque
PHYS 121 - Week 6 Lecture 2 - Rotational Motion
L18 - Dyanamics - Lesson 18 - Rigid Body Kinematics

Kinematic Equations in One Dimension | Physics with Professor Matt Anderson | M2-04
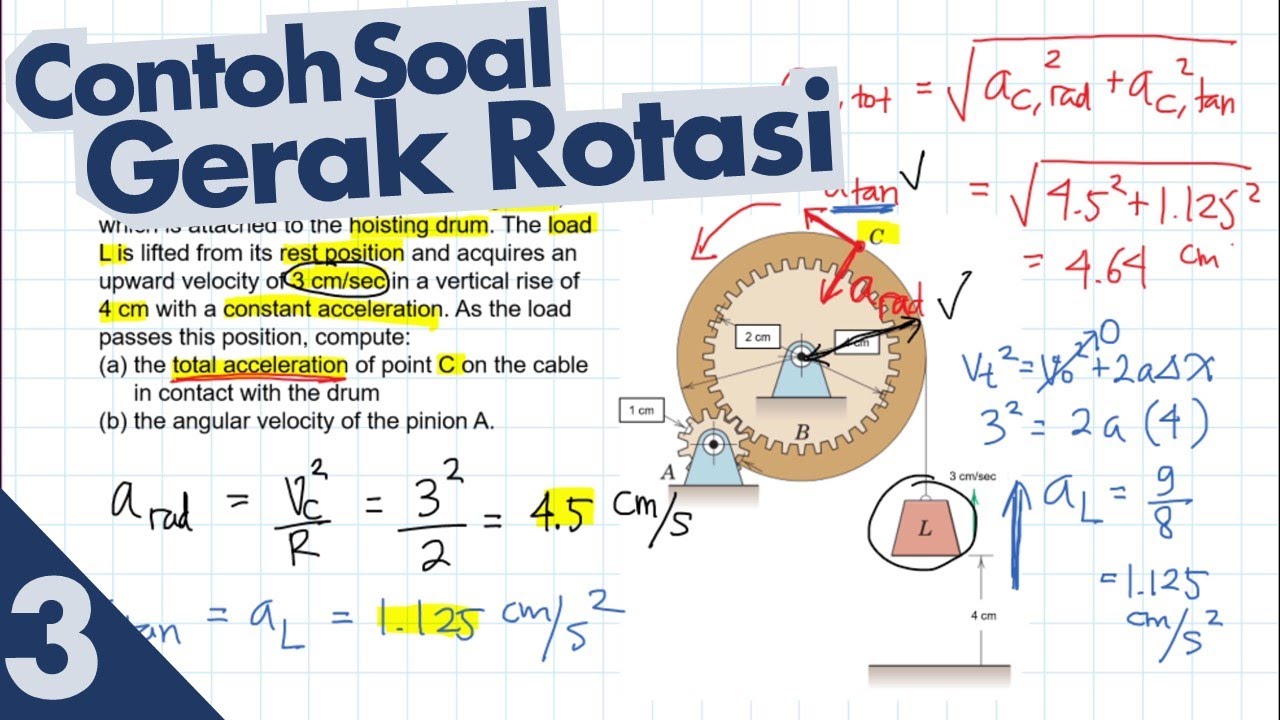
Contoh Soal Gerak Rotasi (Seri Gerak Melingkar dan Rotasi part3)
Rotational Kinematics Physics Problems, Basic Introduction, Equations & Formulas
5.0 / 5 (0 votes)