Camera Car With Pan Tilt Control | ESP32Cam
Summary
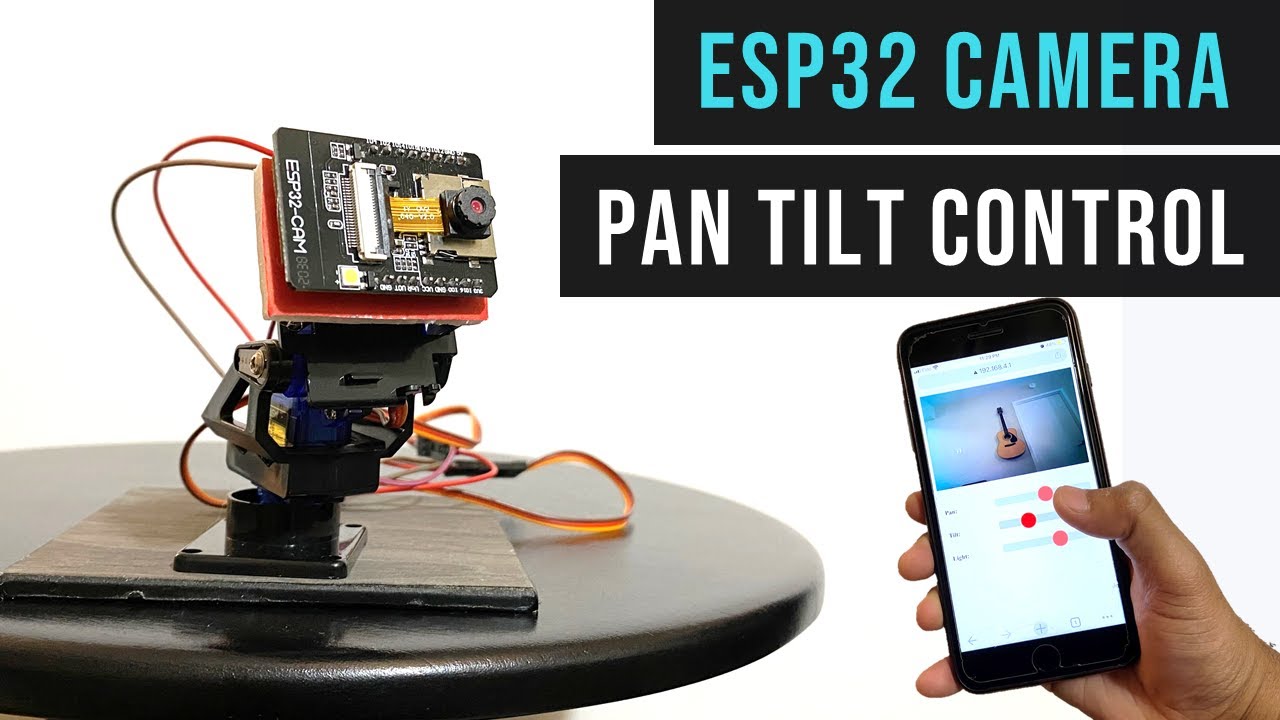
TLDRThis video tutorial guides viewers on creating an upgraded surveillance camera car with pan-tilt control. It uses an ESP32 camera module to capture images and sends them to a mobile phone via Wi-Fi and WebSocket. The car is controlled through a custom mobile app, utilizing components like servo motors, a 4WD car kit, and a motor driver module.
Takeaways
- 🚗 The project involves creating an upgraded surveillance camera car with pan-tilt control.
- 📷 The car will use an ESP32 camera module to capture images and send them to a mobile phone via a WiFi connection.
- 🔧 Key components needed include an ESP32 CAM module, pan-tilt servo assembly, SG90 servo motors, a 4WD car kit, L298 motor driver module, UBC or buck converter, a rechargeable battery, Arduino Uno, double-sided tape, and jumper wires.
- 🔩 The assembly process involves fixing servos to a pan-tilt bracket, soldering wires to gear motors, and mounting motors on the car chassis.
- 🛠️ The L298 motor driver module is connected to the ESP32 CAM module, and the servos are connected to specific I/O pins.
- 📱 Control of the car is managed through a custom mobile app, utilizing a WebSocket for communication.
- 🖥️ The ESP32 board needs to be installed via the Arduino Board Manager, and additional libraries such as Async TCP, Async Web Server, and ESP32 Servo must be added.
- 🌐 The car's WiFi settings, including SSID and password, are configured in the code, and a web server is set up on port 80.
- 🔄 The code includes functions for rotating motors, moving the car, handling root requests, and managing WebSocket events for both car control and video streaming.
- 📸 The camera captures images and sends them to the camera WebSocket client, with the setup and send camera picture functions handling the image capture and transmission.
- 🔌 Important considerations include setting the 'ws max queued messages' to one for smooth video streaming, ensuring proper WiFi connection, and providing a separate 5V DC supply to servos with sufficient current.
Q & A
What is the main project discussed in the video?
-The main project discussed in the video is making an upgraded surveillance camera car with pan-tilt control that can be operated remotely using a mobile app.
What is the purpose of the pan-tilt assembly in this project?
-The pan-tilt assembly allows the camera to rotate both horizontally and vertically, providing a 0 to 180-degree range of motion for capturing images.
Which module is used for capturing images in the car?
-The ESP32 camera module is used for capturing images in the surveillance camera car.
How are the images captured by the ESP32 camera module sent to the mobile phone?
-The images are sent to the mobile phone using a WebSocket through a Wi-Fi connection.
What components are needed to assemble the pan-tilt bracket and servos?
-The components needed include an ESP32 CAM module, a pan-tilt servo assembly, and two SG90 servo motors.
What is the car kit included in the project and what does it come with?
-The 4WD car kit included in the project comes with a car chassis, 4 TT gear motors, wheels, connectors, and screws.
Which motor driver module is used to control the car's motors?
-The L298 motor driver module is used to control the car's motors.
What is the purpose of the UBC or buck converter in the project?
-The UBC or buck converter is used to provide 5 volts to the servos from a 7 to 12-volt DC rechargeable battery.
How is the ESP32 board installed in the Arduino IDE for this project?
-The ESP32 board is installed using the Arduino Board Manager, by adding the ESP32 board link provided in the description and then searching for and installing the ESP32 in the Board Manager.
What libraries need to be installed for the project to function properly?
-The required libraries include Async TCP, Async Web Server, and the ESP32 Servo library, which can be installed via the Arduino IDE's Library Manager.
What is the importance of setting 'ws max queued messages' to one in the AsyncWebServer library?
-Setting 'ws max queued messages' to one is crucial for ensuring that the video stream runs smoothly without delays.
How does the mobile app control the car and the camera?
-The mobile app controls the car and the camera by sending commands to the ESP32 via WebSocket, which then processes these commands to move the car, adjust the camera, or control the servos.
What is the process for connecting the car to the mobile device for control?
-To connect the car to the mobile device, one must connect to the car's Wi-Fi SSID using the provided password, then open Google Chrome on the mobile and type '192.168.4.1' to access the control app.
What are some troubleshooting tips provided in the video for issues with the car or app?
-Troubleshooting tips include setting 'ws max queued messages' to one for smooth video, reconnecting Wi-Fi on the mobile if the app doesn't open, not using the IO 16 pin of ESP32 CAM as it's used internally, and ensuring a separate 5V DC supply with more than 2 ampere current for the servos.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantVoir Plus de Vidéos Connexes
Pan Tilt Control using Servos for ESP32 Cam | WiFi Security Camera

The Basics of Cinematography - Filmmaking for Beginners
APRENDA O ESTILO DE EDIÇÃO DO CANAL MAGNATES MEDIA (O maior canal dark do mundo)

How To Balance DJI Ronin RS3 - COMPLETE Beginner's Guide!

Remote controlling an entire airport

Tutorial: Quick Smooth Camera Movements in Blender
5.0 / 5 (0 votes)
