2-1 a 2-3 Introducción, Posición y Orientación de un Cuerpo Rígido (Curso: Fundamentos de Robótica)
Summary
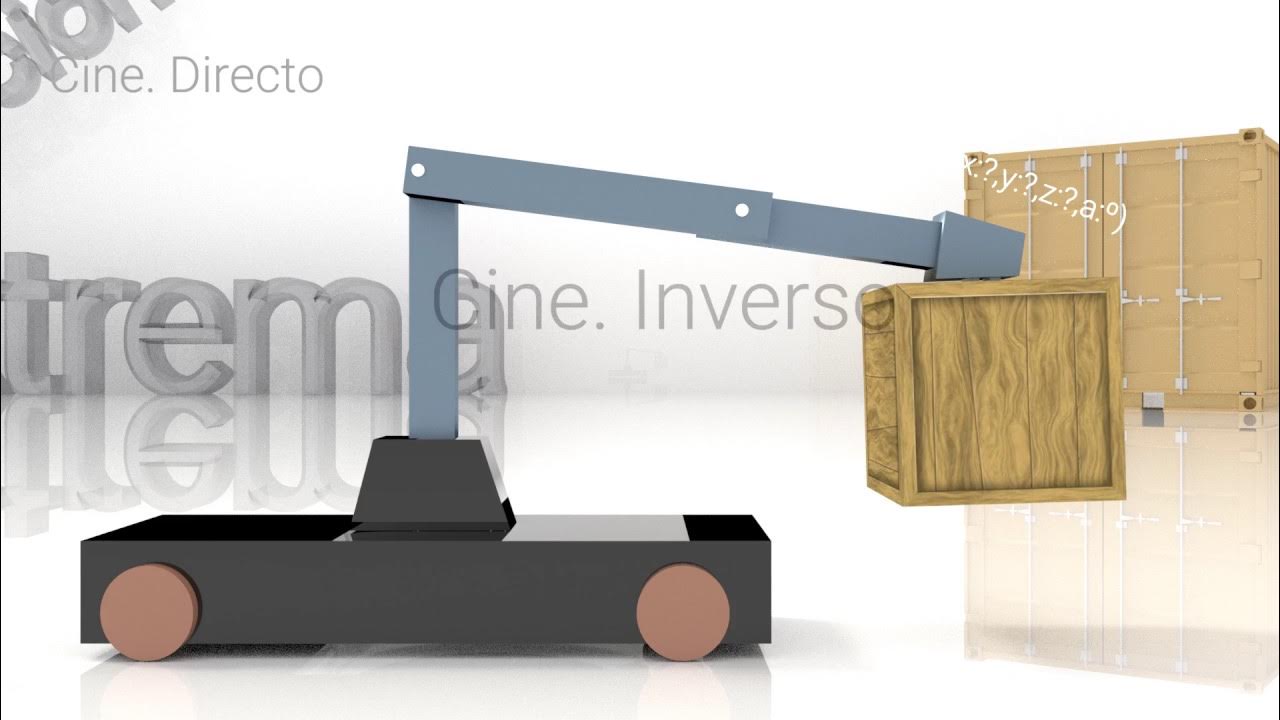
TLDREl guion trata sobre cómo representar la posición y orientación de cuerpos físicos para robots. Se explica la importancia de asignar sistemas de referencia y coordenadas a diferentes partes del robot o objeto. Se discuten métodos para describir la posición y orientación en dos y tres dimensiones, incluyendo coordenadas cartesianas, cilíndricas y esféricas. También se mencionan diferentes representaciones de la orientación de un cuerpo rígido, como la matriz de rotación y las parametrizaciones mínimas.
Takeaways
- 📏 Para que un robot se mueva hacia un objeto, se le asignan sistemas de referencia o coordenadas a partes específicas, como el efecto final, el objeto y la base.
- 🔄 La posición y orientación de un objeto se conocen en relación con la faja, la base y el efecto final, lo que permite controlar el movimiento del robot.
- 🚀 En el caso de robots móviles, se asignan sistemas de referencia tanto en un lugar fijo (sistema inercial) como en el robot mismo para determinar su posición y orientación.
- 🤖 Para robots aéreos, se asignan sistemas de referencia tanto al robot como a otros que se mueven junto con él, y se describen sus posiciones y orientaciones con respecto al sistema inercial.
- 🔍 Para interpretar la información de los sensores en robots como Atlas, se pasa de los sistemas de referencia del sensor al del robot y eventualmente a un sistema inercial.
- 🤖 En robots humanoides, se asignan sistemas de referencia a diferentes partes del cuerpo, como manos, cintura, pecho, cabeza y pies, y se describen sus posiciones y orientaciones con respecto al sistema inercial.
- 📍 Para representar la posición de un cuerpo rígido, se asigna un punto y se describe su posición utilizando un vector posición, que varía según sea bidimensional o tridimensional.
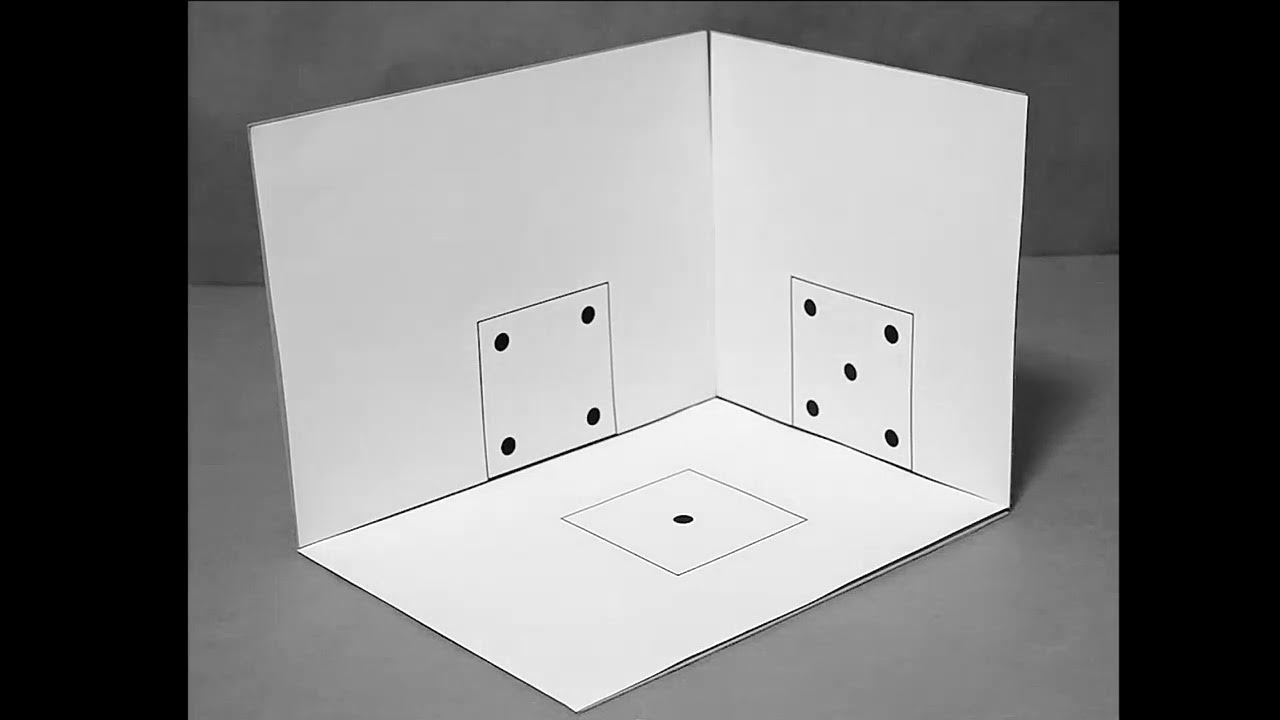
- 📐 Las coordenadas en tres dimensiones pueden ser cartesianas, cilíndricas o esféricas, cada una con sus componentes específicas y conversiones geométricas entre ellas.
- 🌐 La orientación de un cuerpo rígido se representa asignando un sistema de referencia fijo en el cuerpo y relacionándolo con un sistema fijo, requiriendo diferentes coordenadas según sea dos o tres dimensional.
- 🔢 La representación de la orientación puede ser dada por matrices de rotación, coordenadas exponenciales, representación de eje y ángulo, ángulos de Euler o quaterniones, siendo estas últimas una representación implícita con restricciones adicionales.
Q & A
¿Por qué es importante asignar sistemas de referencia a las distintas partes de un robot?
-Es importante porque permite conocer la posición y orientación de cada parte del robot en relación con otras partes y con el entorno. Esto es esencial para que el robot pueda moverse de manera precisa hacia un objetivo.
¿Qué es un sistema inercial y cómo se usa en la navegación de robots?
-Un sistema inercial es un sistema de referencia fijo en el espacio. Se usa como punto de referencia para describir la posición y orientación de un robot en movimiento, permitiendo calcular su trayectoria respecto a un marco estable.
¿Cómo se describen las coordenadas cartesianas en un espacio tridimensional?
-En un espacio tridimensional, las coordenadas cartesianas se expresan mediante tres componentes que corresponden a los ejes X, Y y Z, representando la posición de un punto en el espacio.
¿Cuál es la diferencia entre las coordenadas cilíndricas y esféricas?
-Las coordenadas cilíndricas se basan en un radio, un ángulo respecto al eje X, y una altura Z. Las coordenadas esféricas, en cambio, describen un punto mediante un radio desde el origen, un ángulo desde el eje Z, y un ángulo de proyección en el plano XY.
¿Qué son los ángulos de Euler y para qué se utilizan en robótica?
-Los ángulos de Euler son tres parámetros que describen la orientación de un cuerpo en el espacio tridimensional. Se utilizan para representar las rotaciones de un cuerpo rígido alrededor de los tres ejes principales, facilitando la descripción de la orientación en robótica.
¿Qué función tiene el sensor LIDAR en un robot como Atlas?
-El sensor LIDAR de Atlas emite pulsos de luz láser para detectar objetos en el entorno. Los datos se interpretan en un sistema de referencia específico del sensor y luego se trasladan al sistema de referencia del robot para su análisis y uso en la navegación.
¿Cómo se realiza la conversión entre coordenadas cartesianas y cilíndricas?
-La conversión se realiza usando fórmulas geométricas: las coordenadas X e Y se obtienen como funciones del radio y el ángulo en coordenadas cilíndricas, mientras que la coordenada Z se mantiene igual en ambos sistemas.
¿Qué dificultades presenta la representación de la orientación de un cuerpo rígido en el espacio?
-La representación de la orientación es compleja debido a que el espacio de orientación no es euclidiano, lo que genera problemas en ciertas coordenadas como en el polo norte de una esfera, donde las posibilidades de orientación son infinitas.
¿Qué es una matriz de rotación y cómo se usa para representar la orientación de un cuerpo?
-Una matriz de rotación es una representación matemática que describe la orientación de un cuerpo rígido al relacionar su sistema de referencia con otro sistema fijo. Permite calcular cómo un cuerpo ha rotado en el espacio.
¿Cuáles son los parámetros que se necesitan para describir la posición y orientación de un cuerpo en dos y tres dimensiones?
-En dos dimensiones, se necesita una coordenada para la orientación, y en tres dimensiones se necesitan tres coordenadas, tanto para la posición como para la orientación, debido a los grados de libertad correspondientes.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantVoir Plus de Vidéos Connexes
Robótica: Cinemática del Robot #1

Clase #34 -Media Sección -Dibujo Técnico - Cortes y secciones

Tolerancia geométrica de orientación PARALELISMO
Sistema Monge - Parte II Dado

Introducción a la Robótica | Grados De Libertad | Cinemática Directa e Inversa

Orientación de aerofotografías bajo el Estereoscopio de espejos
5.0 / 5 (0 votes)
