Memahami PID Controller (seri PID Controller part1)
Summary
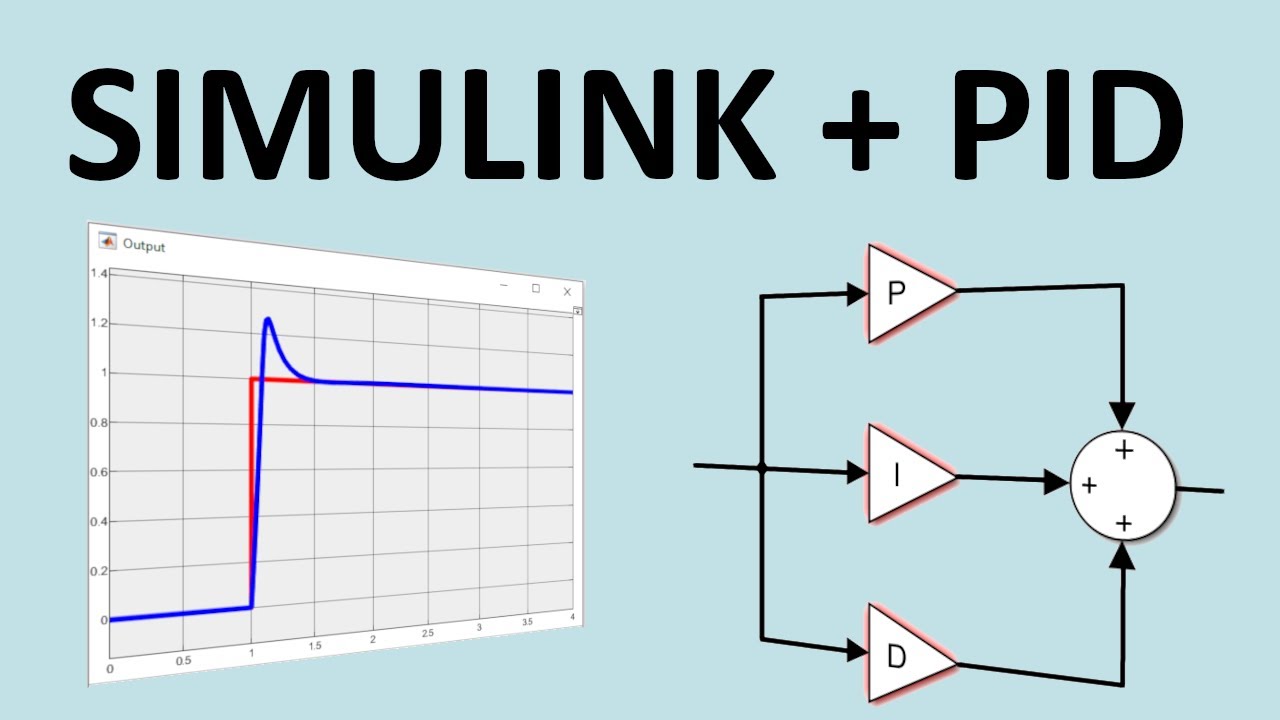
TLDRThis video provides a thorough explanation of how to design and optimize a PID (Proportional-Integral-Derivative) controller for improving a system's step response. Using a given transfer function, the speaker demonstrates how to analyze the open-loop step response, identify steady-state errors, and then progressively introduce proportional, derivative, and integral control elements to reduce error and improve system performance. Through hands-on tuning and adjustment of PID parameters, the video illustrates how each component—P, PD, and PID—affects overshoot, rise time, and steady-state error, ultimately optimizing system behavior for better performance.
Takeaways
- 😀 PID Controller stands for Proportional, Integral, and Derivative, combining three types of control to improve system performance.
- 😀 Step response measures how a system reacts to a step input, and is used to evaluate rise time, overshoot, and steady-state error.
- 😀 Open-loop analysis of the given system shows a very high steady-state error of 95%, indicating poor initial performance.
- 😀 Proportional control (P) reduces steady-state error but increasing KP too much leads to high overshoot.
- 😀 Derivative control (D) helps reduce overshoot and slightly affects rise time, without significantly changing steady-state error.
- 😀 Integral control (I) reduces steady-state error significantly by increasing the system's order, and can also help reduce overshoot.
- 😀 Combining P, I, and D in a PID controller allows for optimized step response with minimal steady-state error, controlled overshoot, and appropriate rise time.
- 😀 Optimal PID parameters in the example are KP = 350, KI = 300, KD = 50 for best overall system performance.
- 😀 The effect of each parameter can be summarized: KP decreases rise time but increases overshoot, KI decreases both rise time and steady-state error, KD decreases overshoot.
- 😀 Understanding PID controllers conceptually, through error feedback multiplied by P, I, and D gains, is as important as the mathematical formulas.
- 😀 Tools like MATLAB, Scilab, and online simulators can be used to visualize step responses and assist in PID tuning.
- 😀 Systematic adjustment of KP, KI, and KD based on rise time, overshoot, and steady-state error helps achieve optimal control performance.
Q & A
What does PID stand for in a PID controller?
-PID stands for Proportional, Integral, and Derivative. It combines these three types of control to improve system performance.
Why is analyzing the open-loop step response important before designing a controller?
-Analyzing the open-loop step response helps to understand the system's natural behavior, including rise time, overshoot, and steady-state error, which serves as a reference for improving the system with a controller.
What was the steady-state error of the given system in open-loop configuration?
-The steady-state value was 0.05 for a step input of 1, which means the steady-state error was 95%, indicating poor tracking performance without control.
How does increasing the proportional gain (Kp) affect the system's step response?
-Increasing Kp reduces the steady-state error but increases the overshoot. Beyond a certain point, further increase may worsen overshoot without significant improvement in steady-state error.
What is the main effect of adding a derivative (D) term to the controller?
-Adding a derivative term helps reduce overshoot and improve transient response without significantly changing the steady-state error.
What impact does an integral (I) term have on the system?
-The integral term reduces steady-state error by accumulating past errors, but it can increase the order of the system and affect overshoot and rise time, requiring careful tuning.
How does a PD controller differ from a PI controller in terms of step response improvements?
-A PD controller mainly improves transient response and reduces overshoot, while a PI controller mainly reduces steady-state error. Combining both addresses both performance aspects.
What was the optimal combination of Kp, Ki, and Kd in the transcript example for the PID controller?
-The optimal values mentioned were Kp = 350, Ki = 300, and Kd = 50, which achieved low overshoot, optimal rise time, and minimal steady-state error.
How does each PID parameter affect rise time, overshoot, and steady-state error?
-Kp decreases rise time but increases overshoot and reduces steady-state error. Ki reduces steady-state error significantly, may slightly increase overshoot, and has similar rise time effects as Kp. Kd slightly affects rise time, reduces overshoot significantly, and does not affect steady-state error.
Why is it important to combine all three PID terms rather than using only one or two?
-Combining all three terms allows for simultaneous improvement of multiple aspects of the step response: Kp handles proportional error, Ki eliminates steady-state error, and Kd controls overshoot and transient dynamics.
What tools or methods were suggested for analyzing the step response of the system?
-Methods include analytical calculation using inverse Laplace transform, MATLAB/Simulink, Python, or online tools like the Okawa Dence website.
What is the practical approach for tuning PID parameters according to the transcript?
-The approach involves observing the effect of changing Kp, Ki, and Kd on rise time, overshoot, and steady-state error, and iteratively adjusting them to achieve an optimal step response. Tables and root locus analysis can guide this process.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahora



5.0 / 5 (0 votes)
