Understanding the Rotation Matrix
Summary
TLDREn este video se exploran las matrices de rotación 2D y 3D, explicando cómo construir una matriz de rotación para cualquier ángulo y cómo aplicarla a puntos en el plano. Se abordan propiedades importantes de estas matrices, como que la inversa de una matriz de rotación es su transpuesta, y que el determinante siempre es 1. También se introduce el concepto de rotaciones en 3D, incluyendo la rotación alrededor de los ejes X, Y y Z, y cómo estas pueden combinarse en una única rotación usando matrices. Finalmente, se menciona cómo dividir rotaciones 3D complejas en rotaciones simples alrededor de un solo eje.
Takeaways
- 😀 La matriz de rotación 2D permite rotar un punto alrededor del origen en sentido antihorario por un ángulo determinado.
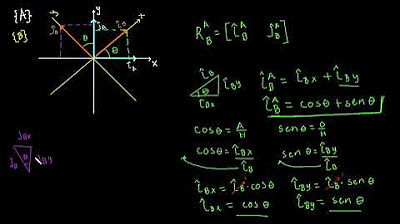
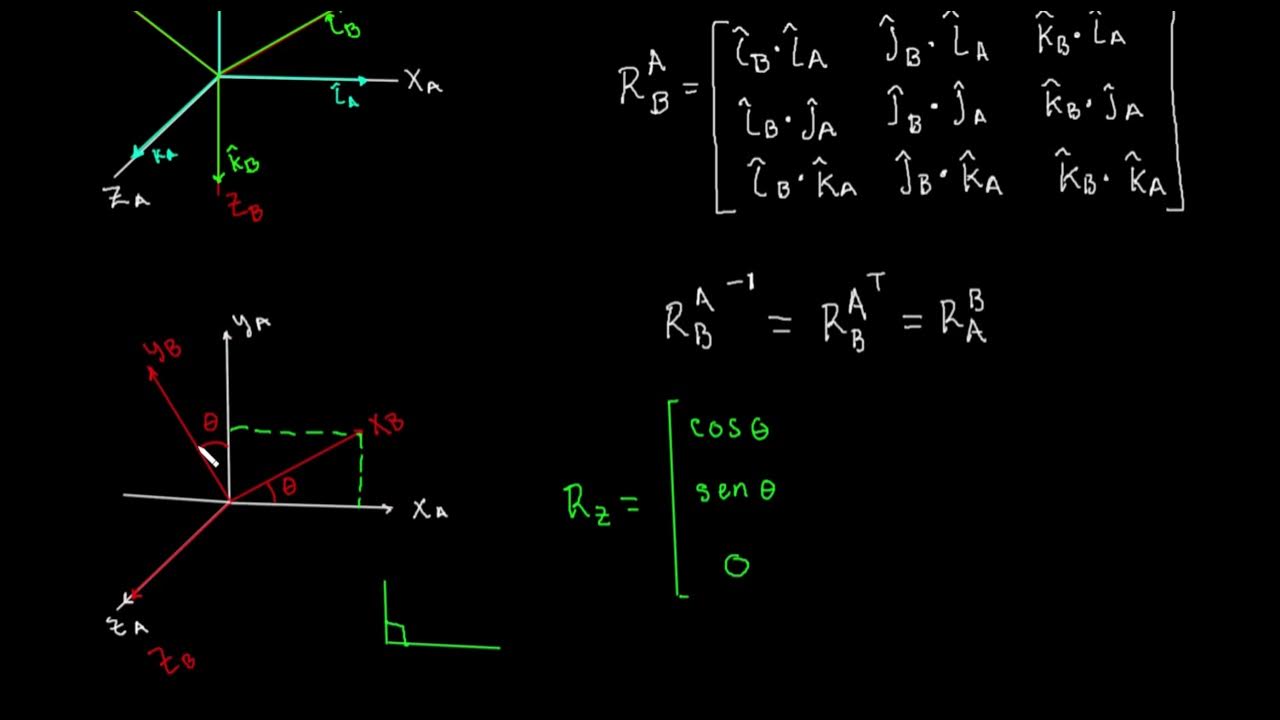
- 😀 La matriz de rotación para cualquier ángulo θ es: [cos(θ), -sin(θ); sin(θ), cos(θ)].
- 😀 Para derivar esta matriz, se usan identidades trigonométricas y se realiza una sustitución para transformar las coordenadas originales en una multiplicación matricial.
- 😀 La matriz de rotación en 2D es útil para rotar puntos o una serie de puntos de forma eficiente.
- 😀 La propiedad más importante de las matrices de rotación es que su inversa es simplemente su transpuesta.
- 😀 Las matrices de rotación siempre tienen un determinante igual a 1, independientemente del valor de θ.
- 😀 Si multiplicas dos matrices de rotación, el resultado es otra matriz de rotación que representa la rotación combinada de ambos ángulos.
- 😀 El grupo de todas las matrices de rotación se llama el grupo ortogonal especial, representado como SO2 para 2D y SO3 para 3D.
- 😀 En 3D, las rotaciones alrededor de los ejes principales (X, Y, Z) son más complicadas, pero la base de las rotaciones es similar a las 2D, añadiendo una tercera dimensión.
- 😀 Para realizar rotaciones en 3D, es común realizar una secuencia de rotaciones alrededor de los ejes X, Y, y Z en un orden específico para obtener el resultado deseado.
- 😀 Las rotaciones en 3D pueden ser intrínsecas o extrínsecas, y el orden de las multiplicaciones de matrices afecta el resultado final de la rotación.
Q & A
¿Cómo se genera una matriz de rotación 2D para un ángulo específico?
-La matriz de rotación 2D para un ángulo específico se construye utilizando la fórmula: R(θ) = [cos(θ) -sin(θ); sin(θ) cos(θ)]. Esta matriz rota un punto alrededor del origen en sentido antihorario por un ángulo θ.
¿Cuáles son las propiedades más importantes de las matrices de rotación?
-Las propiedades clave de las matrices de rotación incluyen que su inversa es su transpuesta, su determinante siempre es 1, y que la multiplicación de dos matrices de rotación da como resultado otra matriz de rotación.
¿Por qué la inversa de una matriz de rotación es su transpuesta?
-La inversa de una matriz de rotación es su transpuesta debido a que la rotación en sentido negativo (o deshacer una rotación) se puede representar simplemente con la transposición de la matriz original. Esto se debe a las identidades trigonométricas que muestran que cos(-θ) = cos(θ) y sin(-θ) = -sin(θ).
¿Qué significa que el determinante de todas las matrices de rotación sea igual a 1?
-El determinante de todas las matrices de rotación es 1 porque la rotación no cambia el volumen ni las áreas, lo que significa que la transformación es isométrica (preserva las distancias). Esto se puede verificar con la fórmula del determinante de una matriz 2D y usando identidades trigonométricas estándar.
¿Cómo se realizan las rotaciones en 3D usando matrices?
-En 3D, las rotaciones se pueden representar usando matrices 3x3. Para una rotación alrededor de un eje, como el eje Z, la matriz se extiende a una 3x3 añadiendo un valor constante de 1 en la posición (3,3) para que el valor Z no se vea afectado por la rotación.
¿Qué es la regla de la mano derecha en el contexto de rotaciones en 3D?
-La regla de la mano derecha establece que si apuntas el pulgar de la mano derecha a lo largo del eje positivo de X y el dedo índice a lo largo del eje positivo de Y, el dedo medio apuntará en la dirección positiva del eje Z. Esto ayuda a determinar la dirección de la rotación en el espacio tridimensional.
¿Cómo se puede rotar un punto alrededor de un eje arbitrario en 3D?
-Para rotar un punto alrededor de un eje arbitrario en 3D, se puede realizar una secuencia de tres rotaciones alrededor de los ejes principales (X, Y, Z). Estas rotaciones se combinan multiplicando las matrices de rotación correspondientes, y el orden de las multiplicaciones es crucial para obtener el resultado correcto.
¿Qué es una rotación extrínseca y cómo se diferencia de una intrínseca?
-Una rotación extrínseca aplica las rotaciones a un sistema de coordenadas fijo, mientras que una rotación intrínseca aplica las rotaciones a un sistema de coordenadas que se mueve con los puntos que se están rotando. Esto significa que en una rotación extrínseca, el orden de las matrices de rotación es invertido en comparación con una rotación intrínseca.
¿Qué son los ángulos de Euler y cómo se usan en rotaciones 3D?
-Los ángulos de Euler son tres ángulos que describen rotaciones secuenciales alrededor de los ejes principales en 3D. Estos ángulos permiten descomponer una rotación arbitraria en tres rotaciones más simples alrededor de los ejes X, Y y Z. Sin embargo, la interpretación y cálculo de estos ángulos puede ser compleja.
¿Por qué es importante entender las rotaciones en 3D en el contexto de la robótica?
-Las rotaciones en 3D son cruciales en robótica porque permiten modelar cómo los robots se mueven y orientan en el espacio tridimensional. Al comprender las rotaciones y cómo combinarlas, los robots pueden realizar movimientos precisos y coordinarse correctamente con su entorno.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraVer Más Videos Relacionados
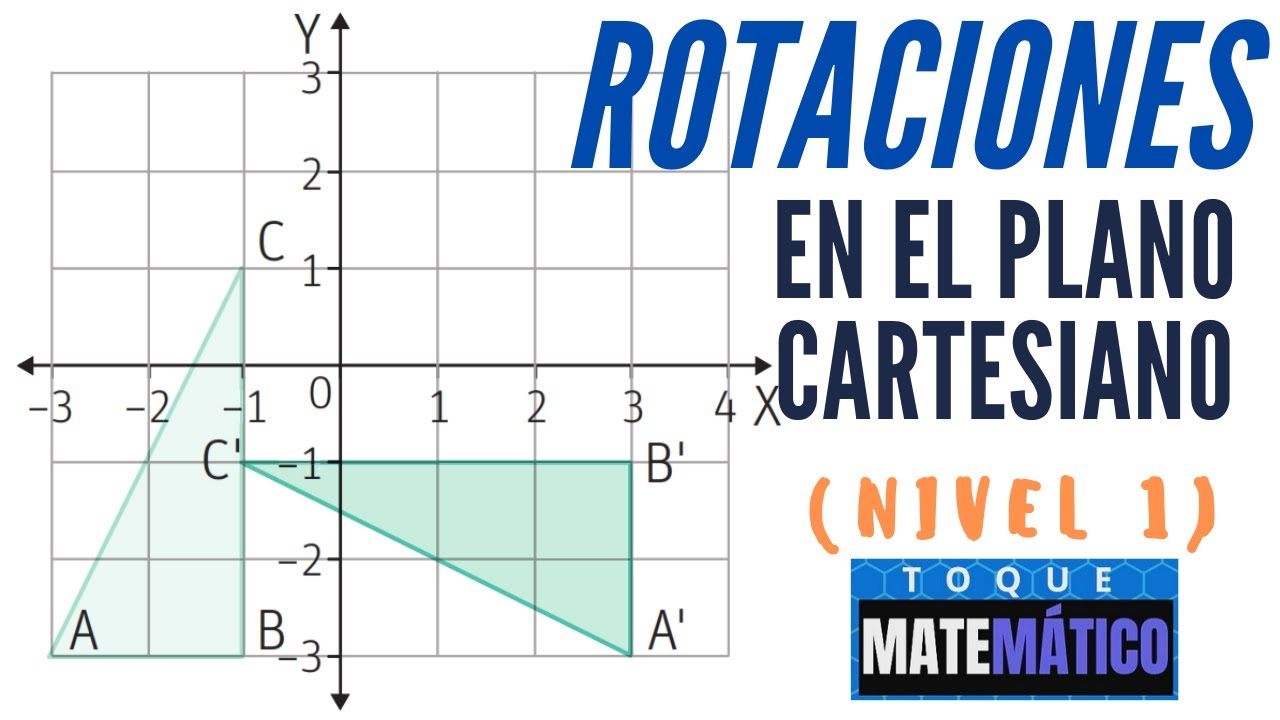
Rotaciones en el Plano Cartesiano ✔ 👌 [TRANSFORMACIONES ISOMETRICAS: ROTACIÓN]
Matrices no cuadradas como transformaciones entre dimensiones | Álgebra lineal, capítulo 6b
Transformaciones lineales en tres dimensiones | Esencia del álgebra lineal, capítulo 4b

Bloque 1: Vectores y sus propiedades
Matriz de rotación en 2d y sistemas de coordenadas
Matrices de rotación en 3D de x, y, z

Lentes convergentes y divergentes - Tipos de lentes
5.0 / 5 (0 votes)