Tuning PID di Simulink
Summary
TLDRIn this tutorial, the process of designing and tuning a PD (Proportional-Derivative) controller for a given transfer function using Simulink and MATLAB is demonstrated. The video walks through setting up the system in Simulink, selecting appropriate controllers, and evaluating system performance through steady-state error and visualizations. The presenter then shows how to optimize the controller's performance using the PID Tuner in Simulink, ultimately achieving a much improved response with minimal steady-state error. The tutorial provides clear insights into control system design and controller tuning for optimal system behavior.
Takeaways
- 😀 The video explains how to design a PID controller for a transfer function in Simulink.
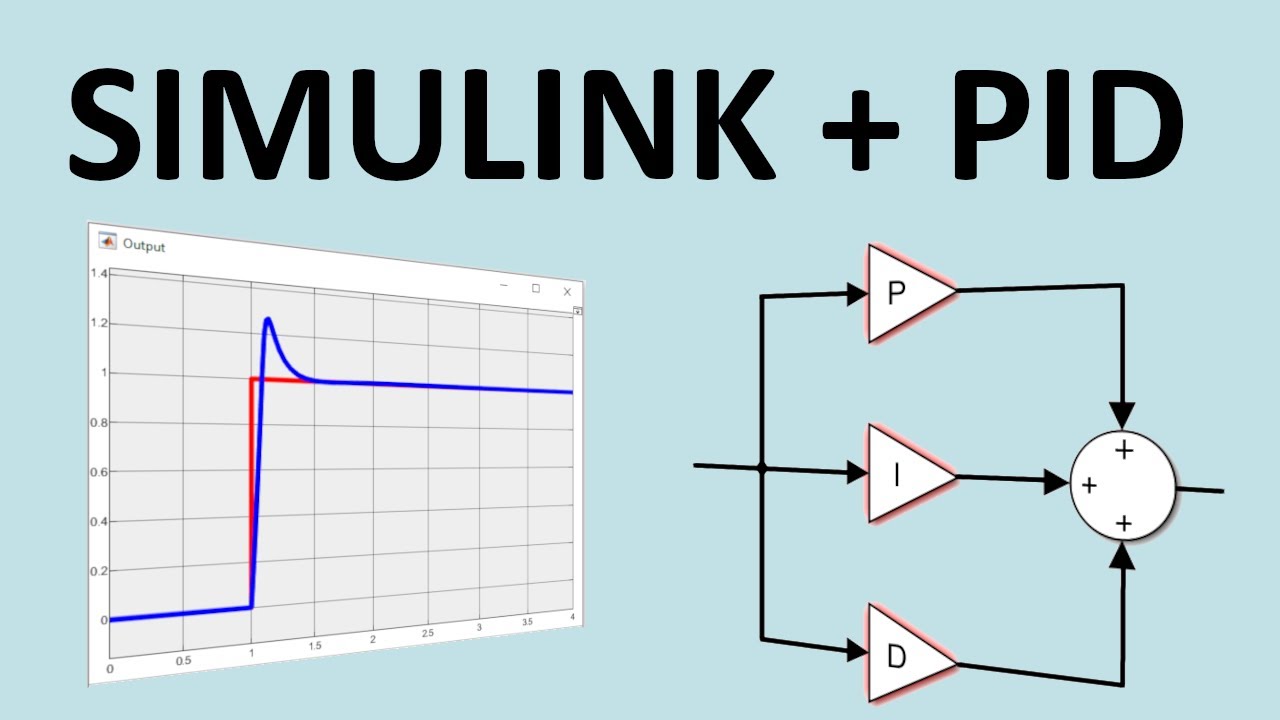
- 😀 The system requires choosing between proportional, derivative, and integral components for the controller design.
- 😀 The transfer function has specific coefficients (1000 and 50) that need to be adjusted for a good response.
- 😀 The Simulink setup involves using a step input and feedback loops to simulate the system behavior.
- 😀 The initial setup used only proportional control, but the response was not optimal.
- 😀 The use of a feedback loop and display tools like a scope and dashboard was suggested for better monitoring.
- 😀 The controller's steady-state error was calculated and improved through adjustments to the control parameters.
- 😀 The video suggests using a PID tuner in Simulink to optimize the system's performance.
- 😀 The PID tuner allows adjustments to response time and transient behavior, making it easier to minimize overshoot and adjust settling time.
- 😀 Once the optimal parameters were set using the PID tuner, the system's performance improved with a minimal steady-state error.
- 😀 The final design results in a system with a very low steady-state error, achieving near-zero error at higher times like 300 seconds.
Q & A
What is the primary focus of the tutorial in the transcript?
-The primary focus of the tutorial is to design and optimize a PD (Proportional-Derivative) controller for a given system transfer function using MATLAB's Simulink.
What components are involved in the Simulink model setup for the PD controller?
-The Simulink model setup includes a step input, a transfer function block, a feedback controller block, and a scope to visualize the results.
How is the PD controller initially tuned in the tutorial?
-The PD controller is initially tuned by setting a proportional controller and integral controller in the Simulink model. The response is tested, and steady-state error is observed.
What is the role of the 'step input' in the Simulink model?
-The 'step input' serves as the reference signal for the system, representing the desired target value for the controller to reach.
What is the significance of steady-state error in the simulation?
-Steady-state error is the difference between the desired setpoint and the system's actual output after a long period. In this tutorial, minimizing the steady-state error is key to optimizing the controller's performance.
How does the PID Tuner help in optimizing the controller?
-The PID Tuner in MATLAB helps adjust the controller's parameters by allowing the user to set response time and transient behavior. It visualizes the system's performance and suggests optimal values to minimize overshoot and settling time.
What is the purpose of using the scope and dashboard in Simulink?
-The scope and dashboard in Simulink are used to visualize and monitor the system's output and the controller's performance in real-time during the simulation.
Why is it important to adjust the response time and transient behavior in controller design?
-Adjusting the response time and transient behavior ensures that the system reaches the setpoint quickly without overshooting or oscillating, thus optimizing system performance.
What happens when the controller's parameters are fine-tuned using the PID Tuner?
-When the controller's parameters are fine-tuned, the steady-state error decreases significantly, and the system response time becomes faster with reduced overshoot, resulting in a more stable and efficient system.
How does the final simulation result compare to the initial one?
-The final simulation result shows a much improved system response, with a significantly reduced steady-state error, faster settling time, and minimal overshoot compared to the initial setup.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraVer Más Videos Relacionados
Simulink Control Systems and PID, Matlab R2020b

Memahami PID Controller (seri PID Controller part1)

How To Implement Fuzzy Logic Control in MATLAB/SIMULINK ? (Part-3) | Dr. J. A. Laghari
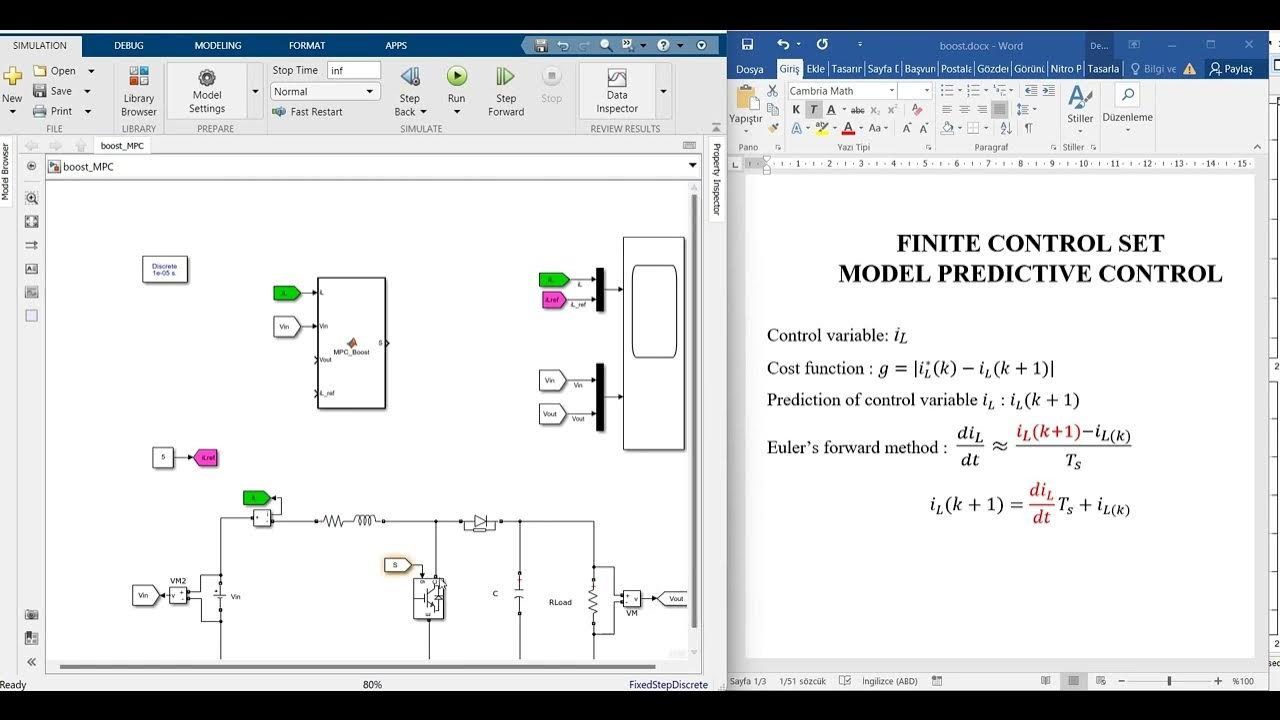
Model Predictive Control of Boost Converter
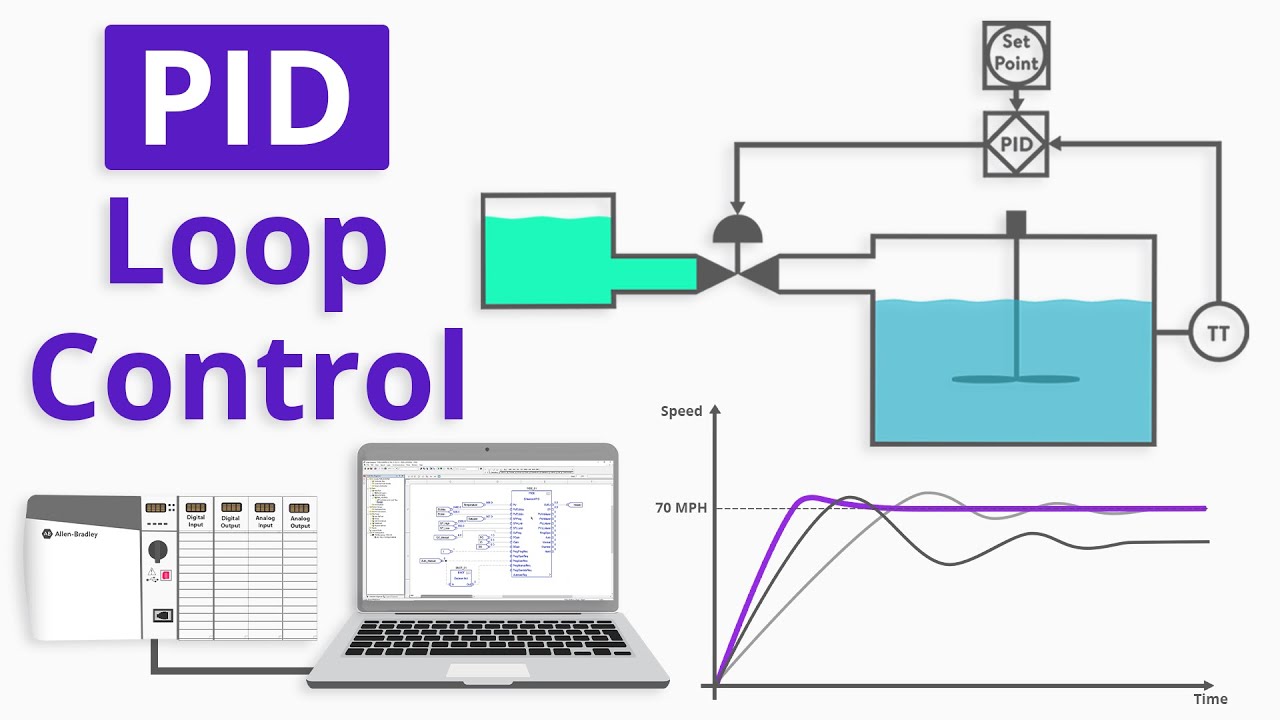
How to Program a Basic PID Loop in ControlLogix
3 Ways to Build a Model for Control System Design | Understanding PID Control, Part 5
5.0 / 5 (0 votes)
