BRAZO ROBOTICO con ARDUINO || PROYECTO Fácil y Rápido
Summary
TLDREn este video, se muestra cómo construir un brazo robótico utilizando Arduino y materiales comunes, como servomotores y motores paso a paso. El creador explica paso a paso cómo montar la estructura usando una base casera, palitos de helado para las articulaciones, y cómo programar los servomotores para mover el brazo y su pinza. A lo largo del tutorial, se ofrecen consejos sobre cómo mejorar el proyecto, como ajustar los cables o reforzar la estructura. El video concluye con una demostración del brazo moviendo objetos. Todos los materiales están disponibles en la descripción.
Takeaways
- 🤖 El vídeo muestra cómo hacer un brazo robótico usando Arduino y materiales caseros.
- 🛠️ Se utilizan servomotores comprados en Amazon y un motor paso a paso incluido en un kit de iniciación de Arduino.
- 📦 La base del brazo robótico es una caja reciclada, a la cual se le ha hecho un agujero para insertar el motor.
- 🔧 El brazo robótico tiene 3-4 grados de libertad y se irán añadiendo más motores a medida que avanza el proyecto.
- 🧩 Los servomotores se colocan con silicona caliente, pegamento que permite que el sistema quede bien sujeto.
- 🍦 Palitos de helado se usan como articulaciones para conectar las diferentes partes del brazo robótico.
- ✂️ Se creó una pinza simple al final del brazo robótico utilizando dos palitos de helado en un ángulo de 90 grados.
- 💻 El código de programación inicializa el brazo robótico en la posición cero y controla los servomotores.
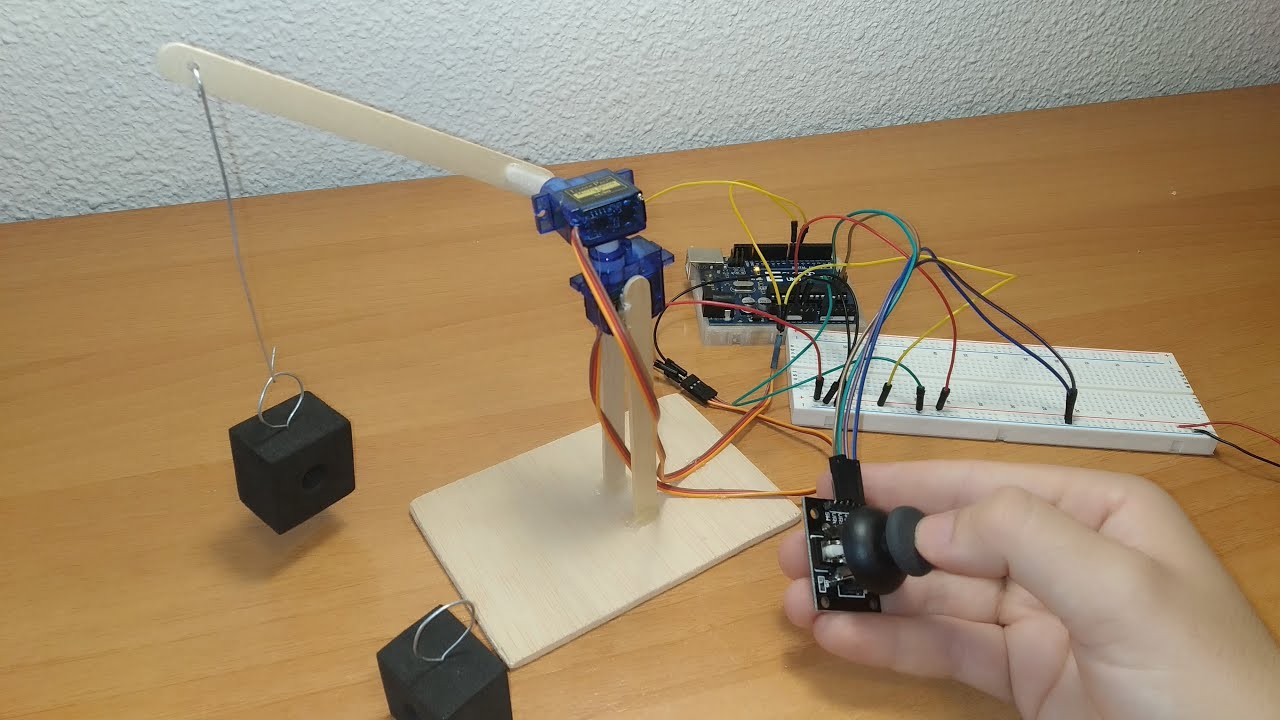
- 🔌 Se explica cómo conectar los cables del motor paso a paso y de los servomotores a la placa Arduino.
- 📦 El brazo robótico funciona levantando y moviendo objetos, demostrando su funcionalidad en el vídeo.
Q & A
¿Qué materiales se necesitan para construir el brazo robótico?
-Los materiales incluyen servomotores, un motor paso a paso, una caja como base, palitos de helado, silicona caliente, y algunos otros componentes que se mencionan a lo largo del video.
¿Cómo se conectan los servomotores al brazo robótico?
-Los servomotores se conectan a través de plataformas en las articulaciones del brazo. Se utiliza silicona caliente para fijarlos, asegurando que estén centrados y firmemente colocados para soportar la fuerza necesaria.
¿Qué función tiene el motor paso a paso en el proyecto?
-El motor paso a paso se utiliza para la base rotatoria del brazo robótico, permitiendo que el brazo gire y tenga más grados de libertad.
¿Cómo se asegura la estabilidad del brazo robótico?
-La estabilidad se logra mediante la correcta colocación de los servomotores y la base. Se recomienda centrar los componentes y evitar que el brazo tenga mucha palanca que pueda causar inestabilidad.
¿Cómo se construye la pinza del brazo robótico?
-La pinza se construye utilizando palitos de helado cortados y pegados en forma de 90 grados. Estos se conectan al servomotor en el extremo del brazo, lo que permite que la pinza se cierre y agarre objetos.
¿Cuál es el proceso de cableado de los servomotores y el motor paso a paso?
-Los servomotores tienen tres cables: tierra, 5V, y el controlador. Estos se conectan a una mini protoboard y a la placa controladora de Arduino. El motor paso a paso se conecta de manera similar, asignando cada pin para un control específico.
¿Qué se debe tener en cuenta al programar los servomotores?
-Es importante recordar en qué número de pin se conecta cada servomotor, ya que esto facilitará la programación. Se deben inicializar los servomotores a cero para que el brazo comience en una posición estándar.
¿Cómo se ajusta la posición inicial del brazo robótico?
-Una vez que se inicializa el robot a cero, si alguna parte del brazo no está en la posición correcta, se debe ajustar manualmente moviendo el componente a su posición adecuada antes de empezar a programar.
¿Qué se recomienda para mejorar la base del brazo robótico?
-Se sugiere utilizar una base más grande y estable si la base actual es pequeña, para asegurar que el brazo robótico pueda moverse sin problemas y sin riesgo de volcarse.
¿Qué tipo de mecanismo se puede usar en lugar de una pinza?
-En lugar de una pinza, se puede utilizar cualquier otro mecanismo, como una ventosa o un agarre especializado, dependiendo del uso que se quiera dar al brazo robótico.
Outlines

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenMindmap

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenKeywords

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenHighlights

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenTranscripts

Dieser Bereich ist nur für Premium-Benutzer verfügbar. Bitte führen Sie ein Upgrade durch, um auf diesen Abschnitt zuzugreifen.
Upgrade durchführenWeitere ähnliche Videos ansehen
GRUA con ARDUINO || PROYECTO con servomotores || Para principiantes [Explicado paso a paso]

Line Follower Robot using Arduino🔥

BRAZO ROBÓTICO con SISTEMA HIDRÁULICO | Cómo se hace | MANUALIDADES RECICLAJE | DIY Te Digo Cómo
Como Hacer El Robot Seguidor De Linea 💯% eficaz ✅

Que es un Motor Paso a Paso y como funciona

Increíble Robot Araña
5.0 / 5 (0 votes)
