RTOS Kernel components
Summary
TLDRIn this video, the presenter explores the core components of real-time operating systems (RTOS), focusing on embedded system platforms, including hardware, board support packages, and application code. The discussion highlights the importance of the kernel, which manages tasks, services, and various synchronization objects like semaphores and mutexes. The video details how the scheduler allocates CPU time, emphasizing the role of the task control block in context switching. Viewers can expect future videos demonstrating practical applications, task creation, and inter-task communication within the RTOS framework.
Takeaways
- 😀 Embedded systems consist of hardware, a board support package (BSP), an operating system (OS), and application code tailored to specific requirements.
- 💻 ARM-based architectures are popular for embedded systems, with options like SOCs from Qualcomm, Texas Instruments, and smaller hardware like Atmega or PIC boards.
- 📦 The Board Support Package (BSP) provides low-level drivers and allows for easy porting of application code across different hardware platforms.
- 🛠️ The RTOS kernel includes essential components such as libraries, device drivers, file systems, and debugging facilities.
- ⏰ The kernel operates on a scheduling algorithm that determines task execution order, which can be round-robin, preemptive, etc.
- 🧩 RTOS tasks can utilize various objects for multitasking and communication, including semaphores, mutexes, message queues, and pipes.
- ⚙️ Services provided by the RTOS can include interrupt handling, timer management, and memory management, which are callable from the application.
- 📊 The Task Control Block (TCB) is crucial for maintaining the state of tasks during preemption, enabling context switching.
- 🔄 Context switching allows tasks to resume from where they were interrupted, updating program counters and internal registers.
- 🔍 Future content will delve deeper into creating tasks, using message queues for communication, and understanding the differences between mutexes and semaphores.
Q & A
What are the main components of an embedded system platform?
-An embedded system platform typically consists of hardware, a Board Support Package (BSP), an operating system (RTOS), and application code. The hardware can range from 8-bit to 32-bit microcontrollers, and the BSP serves as an API for low-level drivers.
Why is ARM architecture popular in embedded systems?
-ARM architecture is popular due to its efficiency and widespread use in System-on-Chips (SoCs) from manufacturers like Qualcomm and Texas Instruments, which offer powerful processing capabilities in compact designs.
What is a Board Support Package (BSP), and why is it important?
-A Board Support Package (BSP) is an API specifically designed for low-level hardware drivers. It is crucial for enabling portability of RTOS code across different hardware platforms, allowing developers to switch hardware with minimal changes.
What are the key categories of components within an RTOS kernel?
-The key categories within an RTOS kernel include the scheduler, objects (such as tasks and semaphores), and services (like interrupt handling and memory management). These components work together to manage tasks and system resources.
What role does the scheduler play in an RTOS?
-The scheduler in an RTOS determines the order and timing of task execution based on algorithms like round-robin and pre-emptive scheduling, which are selected based on application requirements.
What is a Task Control Block (TCB), and what is its function?
-A Task Control Block (TCB) is a data structure that maintains the state of a task during preemption. It allows the task to resume execution from where it left off, thus facilitating context switching in the RTOS.
What types of objects can applications utilize in an RTOS?
-Applications can utilize several types of objects in an RTOS, including tasks, semaphores, mutexes, message queues, and pipes, which aid in multitasking and inter-task communication.
What services does an RTOS provide to applications?
-An RTOS provides various services to applications, such as timer management, interrupt handling, device management, and memory management, enabling efficient resource utilization.
How does context switching occur in an RTOS?
-Context switching occurs when a task is preempted and its state is saved in the TCB. When the task regains control of the CPU, it resumes execution using the saved state, including the stack and internal registers.
What topics will be covered in the upcoming videos mentioned in the presentation?
-The upcoming videos will cover practical applications like creating and spawning tasks, using message queues for communication, understanding the differences between mutexes and semaphores, and managing timers.
Outlines

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنMindmap

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنKeywords

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنHighlights

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنTranscripts

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنتصفح المزيد من مقاطع الفيديو ذات الصلة
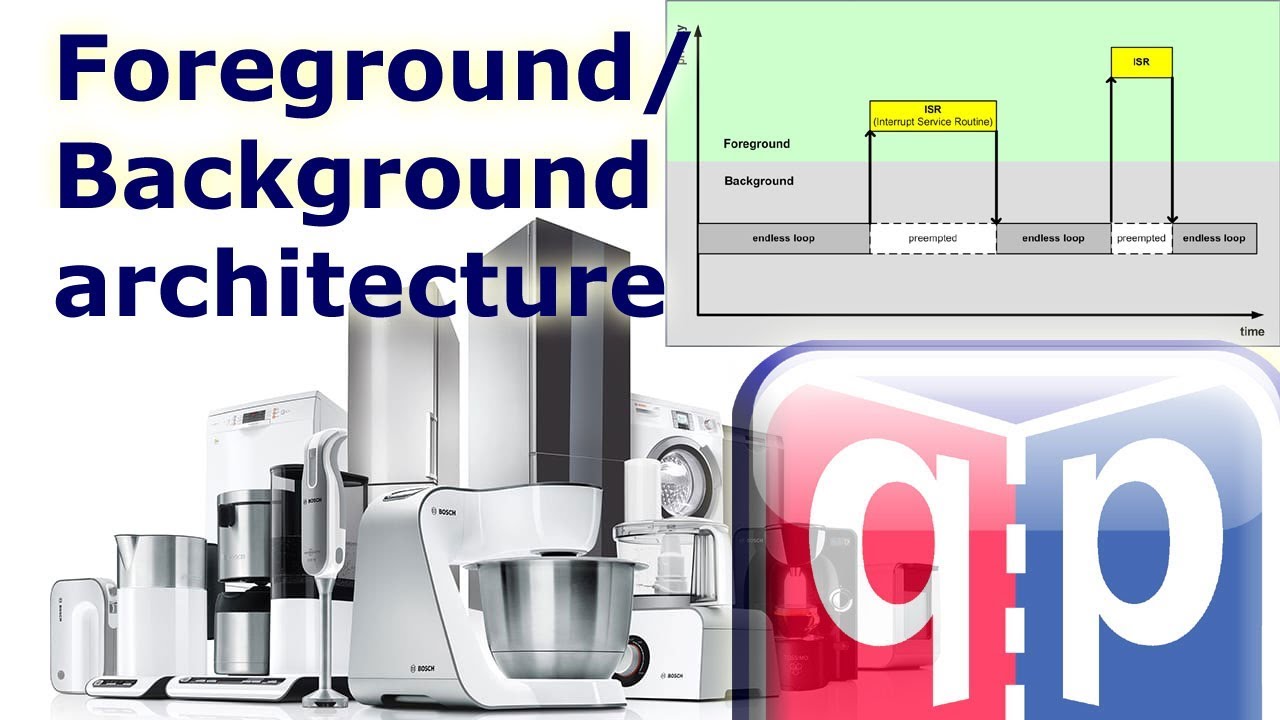
#21 Foreground-Background Architecture ("Superloop")

Sistem Embedded KOMPONEN & KEGUNAAN
Lecture 1 : Introduction

#24 RTOS Part-3: Automating the scheduling with round-robin policy

The Ultimate Roadmap for Embedded Systems | How to become an Embedded Engineer in 2025

Week 1: Lecture 1: Introduction to Operating System.
5.0 / 5 (0 votes)
