6.11 Implementing the Kalman filter for LGSSMs
Richard Turner
13 Apr 202118:36
Outlines

此内容仅限付费用户访问。 请升级后访问。
立即升级Mindmap

此内容仅限付费用户访问。 请升级后访问。
立即升级Keywords

此内容仅限付费用户访问。 请升级后访问。
立即升级Highlights

此内容仅限付费用户访问。 请升级后访问。
立即升级Transcripts

此内容仅限付费用户访问。 请升级后访问。
立即升级浏览更多相关视频

Special Topics - The Kalman Filter (3 of 55) The Kalman Gain: A Closer Look
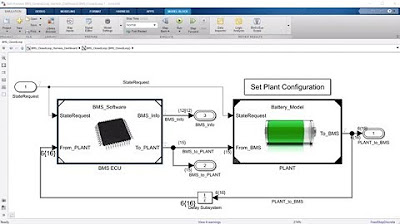
Battery Management System Development in Simulink
Extended Kalman Filter - Sensor Fusion #3 - Phil's Lab #37

Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Estimate Pose

Dynamic Positioning for Dummies - Kalman Filter & Error Computation (4)

Dynamic Positioning for Dummies - Overview (1)

14 | Measure angles with the MPU6050 accelerometer
Rate This
★
★
★
★
★
5.0 / 5 (0 votes)