BasketBot Etapa 1 RE (contador-acumulador)
Summary
TLDREn este video, se explica detalladamente cómo funciona un prototipo de baloncesto que combina componentes electrónicos y mecánicos. El cerebro del robot es un CPU que controla sensores, incluyendo un sensor infrarrojo para contar las pelotas que pasan por el aro y un sensor de contacto para finalizar el conteo. La programación se basa en la declaración de variables, ciclos de conteo y la activación de un buzzer como señal sonora. Se destaca la importancia de agregar retrasos para evitar el conteo excesivo y se demuestra el funcionamiento del prototipo con pruebas prácticas para validar su efectividad.
Takeaways
- 😀 El prototipo de baloncesto incluye componentes electrónicos y mecánicos clave para su funcionamiento, como CPU, sensores, y fuente de energía.
- 😀 El cerebro del prototipo es el CPU, que controla los sensores de contacto, infrarrojos, y el booster.
- 😀 El sensor infrarrojo es el componente principal para contar el número de pelotas que pasan por la cesta del baloncesto.
- 😀 Se utilizan variables para almacenar y contar los eventos, como el paso de la pelota por el sensor infrarrojo.
- 😀 El programa comienza conectando el CPU al sistema y activando los sensores para la programación.
- 😀 El programa se basa en un ejemplo de 'conteo de clics' en el libro de robótica educativa, modificando para usar el sensor infrarrojo en lugar de un sensor de contacto.
- 😀 La variable 'x' se utiliza como acumulador para contar las pelotas que pasan por el sensor infrarrojo.
- 😀 Es importante agregar un retraso (delay) en el programa para evitar que el contador se dispare muchas veces si se mantiene presionado el sensor.
- 😀 El ciclo 'while' ayuda a controlar la ejecución del programa y romper el ciclo cuando se presiona el sensor de contacto.
- 😀 El buzzer emite un pitido cada vez que se incrementa el contador de pelotas, y su duración está controlada por el programa.
- 😀 El prototipo requiere que se apague y se encienda nuevamente para reiniciar el conteo, garantizando que se puedan realizar múltiples intentos de conteo de pelotas.
Q & A
¿Qué componentes electrónicos conforman el prototipo de básquetbol?
-Los componentes electrónicos son: el CPU (cerebro del robot), un sensor de contacto, un sensor infrarrojo, un booster (zumbador) y la fuente de energía, que en este caso es un portátil.
¿Qué función cumple el sensor infrarrojo en este prototipo?
-El sensor infrarrojo es el encargado de contar cuántas pelotas pasan por el área del cesto. Está posicionado observando la parte interna de la cesta.
¿Cómo se utilizan los sensores de contacto en el prototipo?
-El sensor de contacto se utiliza para finalizar el conteo. Cuando se presiona, incrementa la variable 'i' y rompe el ciclo de conteo.
¿Por qué es importante la variable 'x' en la programación?
-La variable 'x' es fundamental porque acumula el número de pelotas que han pasado por el sensor infrarrojo. Su valor se incrementa cada vez que una pelota pasa por el sensor.
¿Qué propósito tiene el delay en el código del prototipo?
-El delay es necesario para evitar que el sistema cuente múltiples veces una pelota si esta permanece mucho tiempo frente al sensor. Ayuda a dar tiempo suficiente para que la pelota pase completamente por el sensor sin contarla varias veces.
¿Cómo se detiene el ciclo de conteo en el programa?
-El ciclo de conteo se detiene cuando el sensor de contacto (que se conecta al puerto 2) es presionado, lo que incrementa la variable 'i' y termina el ciclo 'while'.
¿Qué sucede después de que se presiona el sensor de contacto para finalizar el conteo?
-Cuando se presiona el sensor de contacto, el programa emite un sonido (bip) que indica que se ha completado el conteo. El valor de 'x' se decrementa después de cada bip para reflejar el número de pelotas que pasaron por el sensor.
¿Cuál es el tiempo recomendado para el delay en este prototipo y por qué?
-El tiempo recomendado para el delay es de 0.5 segundos, ya que este tiempo es suficiente para que una pelota pase por el sensor sin que el sistema la cuente más de una vez. Un tiempo menor podría provocar que se cuenten múltiples veces si la pelota permanece demasiado cerca del sensor.
¿Por qué el CPU del prototipo requiere configurar correctamente los puertos de entrada y salida?
-Es crucial configurar correctamente los puertos porque el CPU de Robo Master es un dispositivo con entradas y salidas digitales. Así, el programa debe indicar en qué puerto está conectado cada sensor para que funcione adecuadamente.
¿Qué efecto tiene mantener el sensor de contacto presionado por un tiempo prolongado?
-Si el sensor de contacto es presionado durante un tiempo largo, el programa puede contar múltiples veces el paso de una pelota debido a la velocidad de procesamiento del CPU. Esto se controla colocando un delay para evitar que se cuenten demasiadas veces en intervalos de tiempo muy pequeños.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video

Más sobre ¨Calentar el Auto¨ y el circuito de lubricación del motor.

sistema eléctrico nevera no Frost y fallas comunes en neveras convencionales

SMPS 12V-10 A explicacion con esquema y fuente conmutada (clase 111)
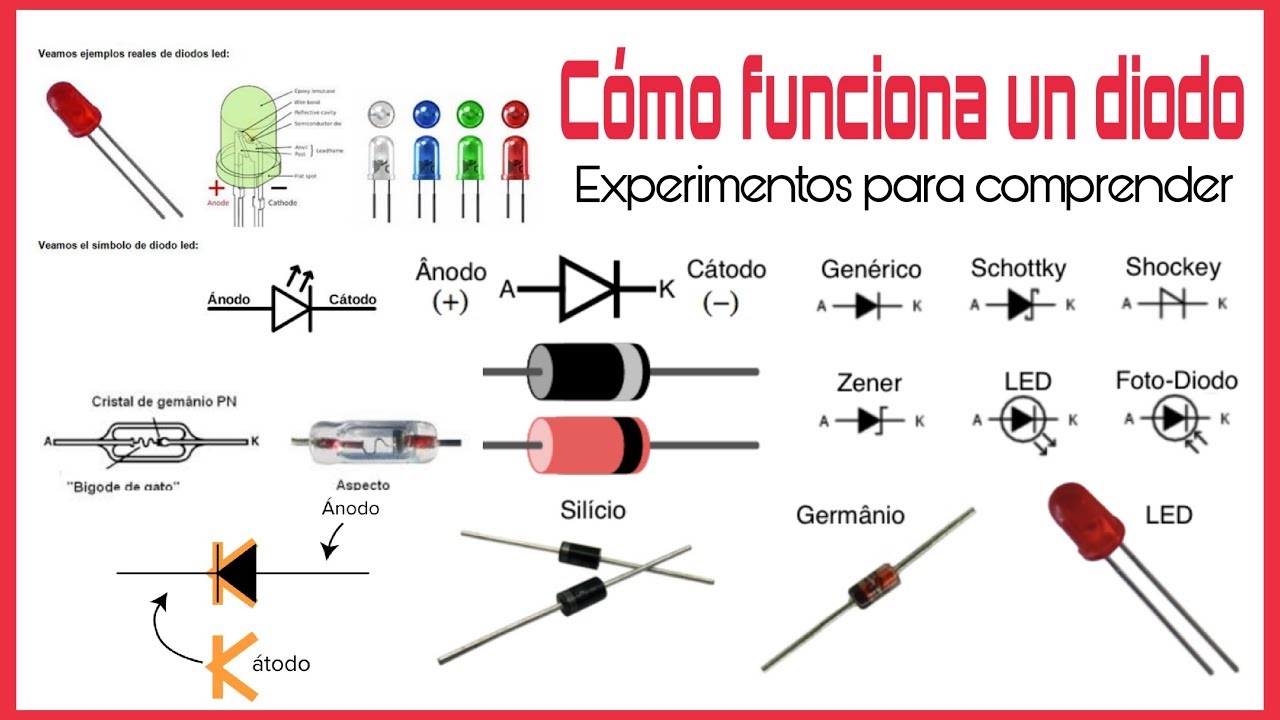
CÓMO FUNCIONA UN DIODO | EXPERIMENTOS PARA COMPRENDER

Semáforo Led🚦Circuito Automatizado con transistores

¡SENSOR de MOVIMIENTO INFRARROJO! 👍 Excelente Proyecto de Electrónica
5.0 / 5 (0 votes)
