Robot Arm using ESP32 and Smartphone | Complete Robot Arm assembly 🔥
Summary
TLDRIn this video, the creator demonstrates how to build and control a robotic arm using an ESP32 module and servo motors. The project includes assembling the arm, wiring the components, and writing the necessary code to control the movements via a mobile app using WebSocket and Wi-Fi. The app allows for real-time control, recording, and playback of the arm's movements. The tutorial covers all aspects, from hardware setup to software configuration, making it accessible for beginners to create their own robotic arm. It also includes troubleshooting tips for ensuring proper power supply and smooth operation.
Takeaways
- 😀 Build a robotic arm controlled by an ESP32 module, using servo motors for movement and Wi-Fi for communication.
- 😀 The system allows control through a mobile app, which uses WebSocket for real-time interaction with the ESP32 module.
- 😀 You can record the robo arm's movements and play them back later, providing an easy way to save and reuse steps.
- 😀 The app shows live servo positions, updating in real-time as the arm moves or when recorded steps are played.
- 😀 The necessary components include a robo arm kit, 4 servo motors, an ESP32 module, a 5V AC/DC adapter (with at least 2-3A output), and jumper wires.
- 😀 The ESP32 module is mounted on the arm base using double-sided tape, and it connects to the servo motors via signal pins for control.
- 😀 The code includes libraries for controlling the ESP32 board, asynchronous TCP connections, and servo motors, enabling communication between the mobile app and the module.
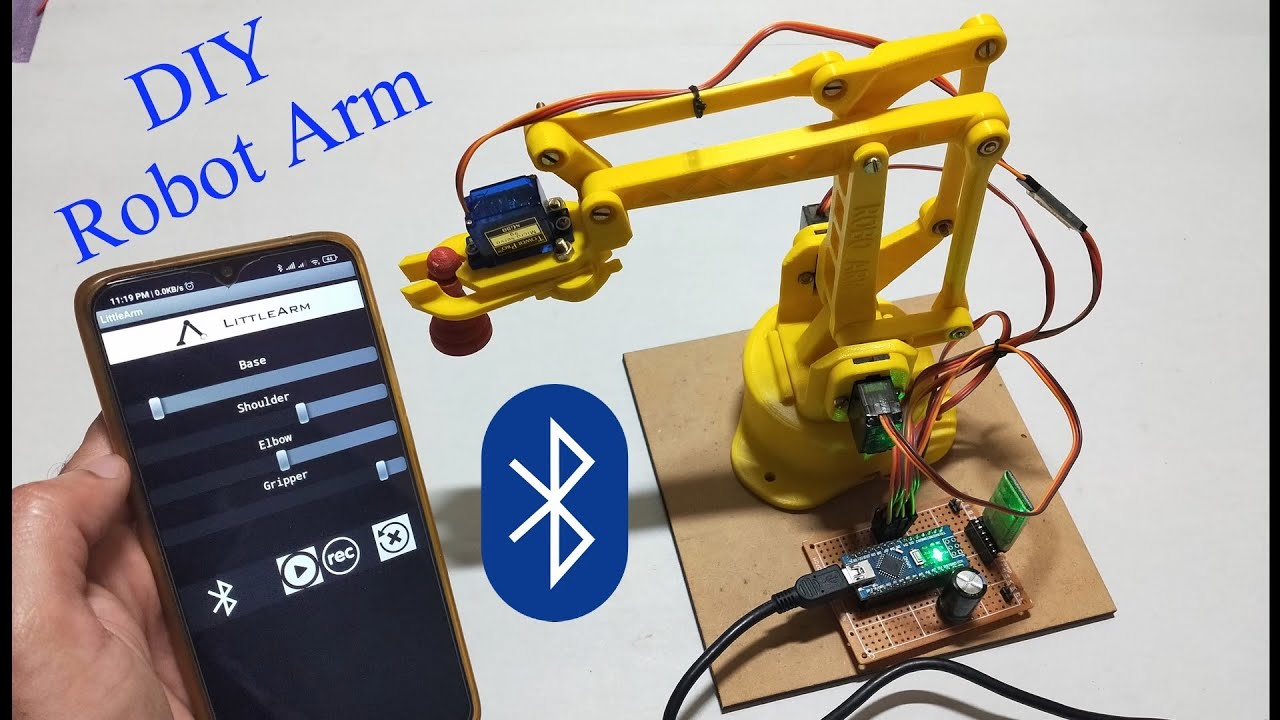
- 😀 The mobile app interface includes sliders for controlling the arm's movements and buttons to start recording or playback of movements.
- 😀 The ESP32 creates its own Wi-Fi network, to which the mobile device connects, allowing you to control the arm through the web browser by entering the ESP32’s IP address.
- 😀 Proper power supply (5V DC, 2-3A) is essential to ensure the robo arm functions correctly and the servo motors perform optimally.
Q & A
What are the main components required to build the robo arm?
-To build the robo arm, you'll need a robo arm kit, 4 servo motors, an ESP32 module, a 5V DC adapter that provides at least 2-3A current, and some jumper wires for connections.
How do you control the robo arm using the mobile app?
-The robo arm is controlled via a mobile app by using sliders to adjust the positions of the servos. These commands are sent to the ESP32 module over a Wi-Fi connection using WebSocket.
What is the purpose of the WebSocket in this project?
-WebSocket is used to establish a real-time, bidirectional communication channel between the mobile app and the ESP32 module, allowing immediate control of the servo motors and live feedback on their positions.
How does the robot record and play back movements?
-The robo arm can record movements by capturing the positions of the servos through the mobile app. Once recorded, the movements can be played back by pressing the 'play' button, and the app will display the live position of the servos during playback.
What software libraries are required to control the ESP32 module?
-You need to install the ESP32 board using the Arduino board manager and the Async TCP, Async Web Server, and ESP32 Servo libraries for controlling the servo motors and managing communication between the ESP32 and the mobile app.
How is the ESP32 module connected to the servo motors?
-The ESP32 module is connected to the servo motors through the 5V and ground pins for power, and the signal pins of the servos are connected to the corresponding GPIO pins on the ESP32 to control the servo movements.
Can the robo arm's movements be controlled without a mobile app?
-No, the robo arm's movements in this setup are specifically controlled through the mobile app interface, which communicates with the ESP32 module over Wi-Fi. The app provides sliders and buttons to send commands to the robot.
What happens when the 'record' button is pressed on the mobile app?
-When the 'record' button is pressed, the robot starts recording the positions of the servos. These positions are saved in the app and can later be played back by pressing the 'play' button.
How does the mobile app display the current state of the robo arm?
-The mobile app shows the real-time positions of the servos as sliders move in sync with the servo movements. Additionally, it updates the state of the arm whenever it is refreshed or when playback is active.
What are the power requirements for the robo arm?
-The robo arm requires a 5V DC power supply that can provide at least 2-3A of current to ensure that all components, particularly the servos, receive sufficient power to operate smoothly.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video

Robotic Arm with Arduino - Save/Play/Export/Import Positions.
DIY | Smartphone (Bluetooth) controlled Robot Arm using Arduino | HC-05
Pan Tilt Control using Servos for ESP32 Cam | WiFi Security Camera

ESP32 Servo Motor Web Server with Arduino IDE

Camera Car With Pan Tilt Control | ESP32Cam

ESP32 Home automation with Google Assistant Alexa & Manual Switches - Internet of Things 2021
5.0 / 5 (0 votes)