BRAZO ROBOTICO con ARDUINO || PROYECTO Fácil y Rápido
Summary
TLDREn este video, se muestra cómo construir un brazo robótico utilizando Arduino y materiales comunes, como servomotores y motores paso a paso. El creador explica paso a paso cómo montar la estructura usando una base casera, palitos de helado para las articulaciones, y cómo programar los servomotores para mover el brazo y su pinza. A lo largo del tutorial, se ofrecen consejos sobre cómo mejorar el proyecto, como ajustar los cables o reforzar la estructura. El video concluye con una demostración del brazo moviendo objetos. Todos los materiales están disponibles en la descripción.
Takeaways
- 🤖 El vídeo muestra cómo hacer un brazo robótico usando Arduino y materiales caseros.
- 🛠️ Se utilizan servomotores comprados en Amazon y un motor paso a paso incluido en un kit de iniciación de Arduino.
- 📦 La base del brazo robótico es una caja reciclada, a la cual se le ha hecho un agujero para insertar el motor.
- 🔧 El brazo robótico tiene 3-4 grados de libertad y se irán añadiendo más motores a medida que avanza el proyecto.
- 🧩 Los servomotores se colocan con silicona caliente, pegamento que permite que el sistema quede bien sujeto.
- 🍦 Palitos de helado se usan como articulaciones para conectar las diferentes partes del brazo robótico.
- ✂️ Se creó una pinza simple al final del brazo robótico utilizando dos palitos de helado en un ángulo de 90 grados.
- 💻 El código de programación inicializa el brazo robótico en la posición cero y controla los servomotores.
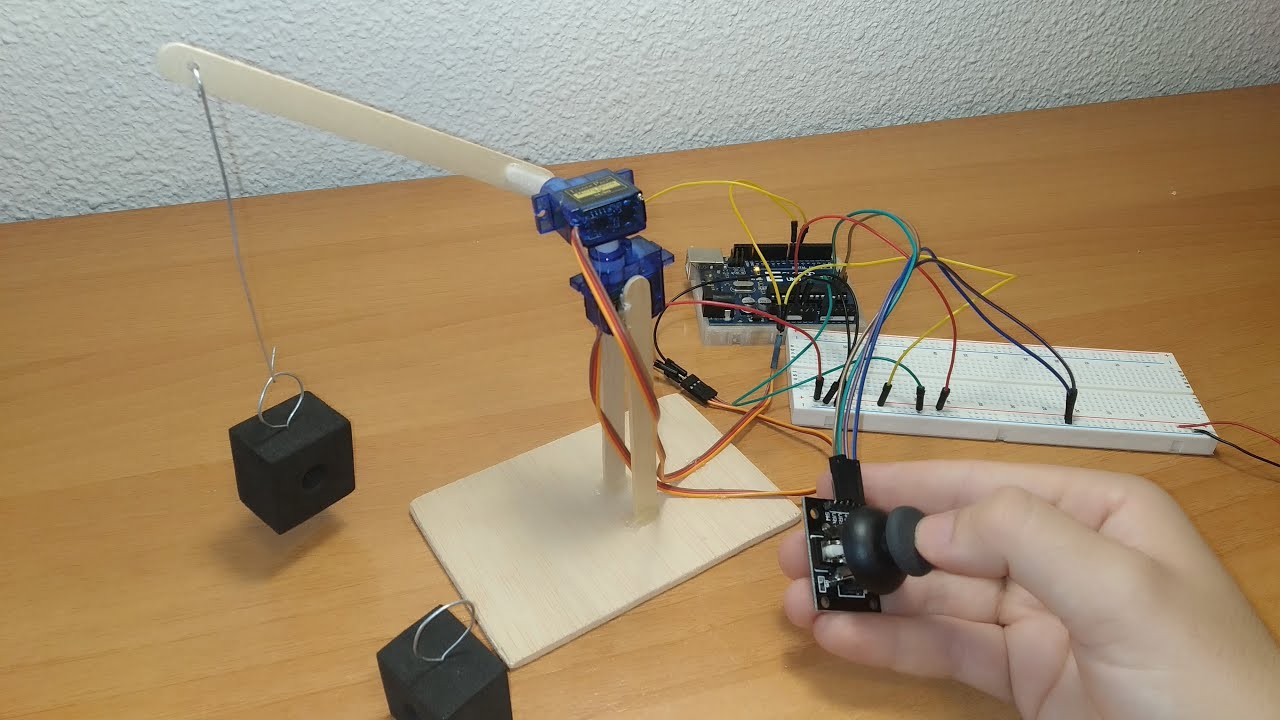
- 🔌 Se explica cómo conectar los cables del motor paso a paso y de los servomotores a la placa Arduino.
- 📦 El brazo robótico funciona levantando y moviendo objetos, demostrando su funcionalidad en el vídeo.
Q & A
¿Qué materiales se necesitan para construir el brazo robótico?
-Los materiales incluyen servomotores, un motor paso a paso, una caja como base, palitos de helado, silicona caliente, y algunos otros componentes que se mencionan a lo largo del video.
¿Cómo se conectan los servomotores al brazo robótico?
-Los servomotores se conectan a través de plataformas en las articulaciones del brazo. Se utiliza silicona caliente para fijarlos, asegurando que estén centrados y firmemente colocados para soportar la fuerza necesaria.
¿Qué función tiene el motor paso a paso en el proyecto?
-El motor paso a paso se utiliza para la base rotatoria del brazo robótico, permitiendo que el brazo gire y tenga más grados de libertad.
¿Cómo se asegura la estabilidad del brazo robótico?
-La estabilidad se logra mediante la correcta colocación de los servomotores y la base. Se recomienda centrar los componentes y evitar que el brazo tenga mucha palanca que pueda causar inestabilidad.
¿Cómo se construye la pinza del brazo robótico?
-La pinza se construye utilizando palitos de helado cortados y pegados en forma de 90 grados. Estos se conectan al servomotor en el extremo del brazo, lo que permite que la pinza se cierre y agarre objetos.
¿Cuál es el proceso de cableado de los servomotores y el motor paso a paso?
-Los servomotores tienen tres cables: tierra, 5V, y el controlador. Estos se conectan a una mini protoboard y a la placa controladora de Arduino. El motor paso a paso se conecta de manera similar, asignando cada pin para un control específico.
¿Qué se debe tener en cuenta al programar los servomotores?
-Es importante recordar en qué número de pin se conecta cada servomotor, ya que esto facilitará la programación. Se deben inicializar los servomotores a cero para que el brazo comience en una posición estándar.
¿Cómo se ajusta la posición inicial del brazo robótico?
-Una vez que se inicializa el robot a cero, si alguna parte del brazo no está en la posición correcta, se debe ajustar manualmente moviendo el componente a su posición adecuada antes de empezar a programar.
¿Qué se recomienda para mejorar la base del brazo robótico?
-Se sugiere utilizar una base más grande y estable si la base actual es pequeña, para asegurar que el brazo robótico pueda moverse sin problemas y sin riesgo de volcarse.
¿Qué tipo de mecanismo se puede usar en lugar de una pinza?
-En lugar de una pinza, se puede utilizar cualquier otro mecanismo, como una ventosa o un agarre especializado, dependiendo del uso que se quiera dar al brazo robótico.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video
GRUA con ARDUINO || PROYECTO con servomotores || Para principiantes [Explicado paso a paso]

Line Follower Robot using Arduino🔥

BRAZO ROBÓTICO con SISTEMA HIDRÁULICO | Cómo se hace | MANUALIDADES RECICLAJE | DIY Te Digo Cómo
Como Hacer El Robot Seguidor De Linea 💯% eficaz ✅

Que es un Motor Paso a Paso y como funciona

Increíble Robot Araña
5.0 / 5 (0 votes)
