6.11 Implementing the Kalman filter for LGSSMs
Summary
Please replace the link and try again.
Outlines

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифMindmap

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифKeywords

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифHighlights

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифTranscripts

Этот раздел доступен только подписчикам платных тарифов. Пожалуйста, перейдите на платный тариф для доступа.
Перейти на платный тарифПосмотреть больше похожих видео

Special Topics - The Kalman Filter (3 of 55) The Kalman Gain: A Closer Look
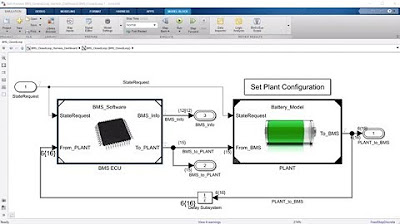
Battery Management System Development in Simulink
Extended Kalman Filter - Sensor Fusion #3 - Phil's Lab #37

Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Estimate Pose

Dynamic Positioning for Dummies - Kalman Filter & Error Computation (4)

Dynamic Positioning for Dummies - Overview (1)

14 | Measure angles with the MPU6050 accelerometer
5.0 / 5 (0 votes)