Motor Control Design with MATLAB and Simulink
Summary
TLDRThis video provides a comprehensive guide on motor control using MATLAB and Simulink, focusing on Field Oriented Control (FOC), dynamic decoupling, and flux weakening control for permanent magnet synchronous motors (PMSM). It demonstrates key concepts like auto-tuning PI controllers, implementing torque and speed control loops, and optimizing motor performance in electric vehicles. The video is aimed at engineers looking to understand and apply motor control strategies to improve dynamic response, efficiency, and performance in advanced motor applications.
Takeaways
- 😀 The script covers multiple aspects of motor control using MATLAB and Simulink, focusing on Field-Oriented Control (FOC).
- 🔧 In Model 3, instead of a speed closed-loop, there is a torque control loop implemented.
- ⚙️ The controller in Model 3 takes two main inputs: the torque command and the speed feedback from the motor.
- 📊 The lookup tables for flux weakening control generate ID and IQ current commands based on torque command and speed feedback.
- 🖱️ Users can visualize lookup table points in Simulink by clicking on breakpoints and exploring the lookup surface interface.
- 🚀 The test scenario demonstrates torque response tracking the command accurately, showing step changes in torque values (e.g., 100 to 200 Newton meters).
- 🔄 Speed control is facilitated by the Dino speed source, which ramps speed from 0 rpm to 1500 rpm within one second in this case.
- 📉 The system operates in a flux weakening region once the speed reaches 1500 rpm, ensuring proper dynamic control at higher speeds.
- 📝 The video summary touches on key control topics: FOC control, auto-tuning, PI controller dynamics, decoupling control, and flux weakening control.
- 🔍 The script encourages viewers to explore and experiment with MATLAB and Simulink models, and offers resources for further learning through MathWorks search pages focused on motor and power control design.
Q & A
What is Field-Oriented Control (FOC) in the context of motor control?
-Field-Oriented Control (FOC) is a technique used to control PMSMs (Permanent Magnet Synchronous Motors) that decouples the torque and flux control. It enables independent control of the motor's flux and torque by aligning the rotor flux with the d-axis, which simplifies motor control and improves efficiency.
How does auto-tuning PI controller gains help improve motor performance?
-Auto-tuning PI controller gains helps optimize the performance of the motor by adjusting the proportional (P) and integral (I) gains automatically based on system performance. This allows the motor to respond more efficiently to dynamic changes, reducing overshoot and improving control accuracy.
What is dynamic decoupling control and why is it important for PMSM?
-Dynamic decoupling control is used to cancel the cross-coupling terms between the d and q axes in a PMSM. It is important because cross-coupling can negatively affect the performance, particularly at higher speeds. By decoupling the dynamics, the system achieves better control and stability during operation.
What role does flux weakening play in PMSM operation?
-Flux weakening allows PMSMs to operate beyond their base speed by reducing the motor's magnetic flux. This is necessary to prevent voltage limitations from limiting the motor's speed, especially in applications requiring high-speed operation such as electric vehicles.
What is the significance of the lookup table in flux weakening control?
-The lookup table in flux weakening control is used to determine the optimal values of current commands (ID and IQ) based on the motor's torque command and speed feedback. This allows the system to adjust for operation in the flux weakening region and ensure that the motor can achieve the desired performance.
How does the torque control loop function in the model described in the video?
-The torque control loop adjusts the motor's torque output based on the torque command and feedback from the motor's speed. The system dynamically adjusts the motor's current to follow the torque command, ensuring that the motor responds accurately to changes in load or desired torque.
Why does the torque command step up to 200 Newton-meters at 1.25 seconds in the simulation?
-The torque command steps up to 200 Newton-meters at 1.25 seconds to simulate a load increase or change in motor performance. This tests the motor's ability to follow torque commands and adjust dynamically under varying load conditions.
What is the significance of operating above the base speed in a PMSM?
-Operating above the base speed in a PMSM requires flux weakening, as it allows the motor to exceed the base speed limit. This is essential for applications requiring high-speed operation, such as in electric vehicles or industrial machinery, where speed beyond the base limit is necessary for performance.
What is the function of the 'Dino speed source' in the Simulink model?
-The 'Dino speed source' in the Simulink model is responsible for simulating the motor's speed response. It controls the motor's speed by ramping it up and down, allowing the testing of motor behavior under different speed conditions, including in the flux weakening region.
How does the video suggest learning more about motor control with MATLAB and Simulink?
-The video suggests searching for 'motor and power control design with Simulink' on MathWorks' website. There, users can access a variety of resources and information to deepen their understanding of motor control techniques and how to implement them using MATLAB and Simulink.
Outlines

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードMindmap

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードKeywords

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードHighlights

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードTranscripts

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレード関連動画をさらに表示
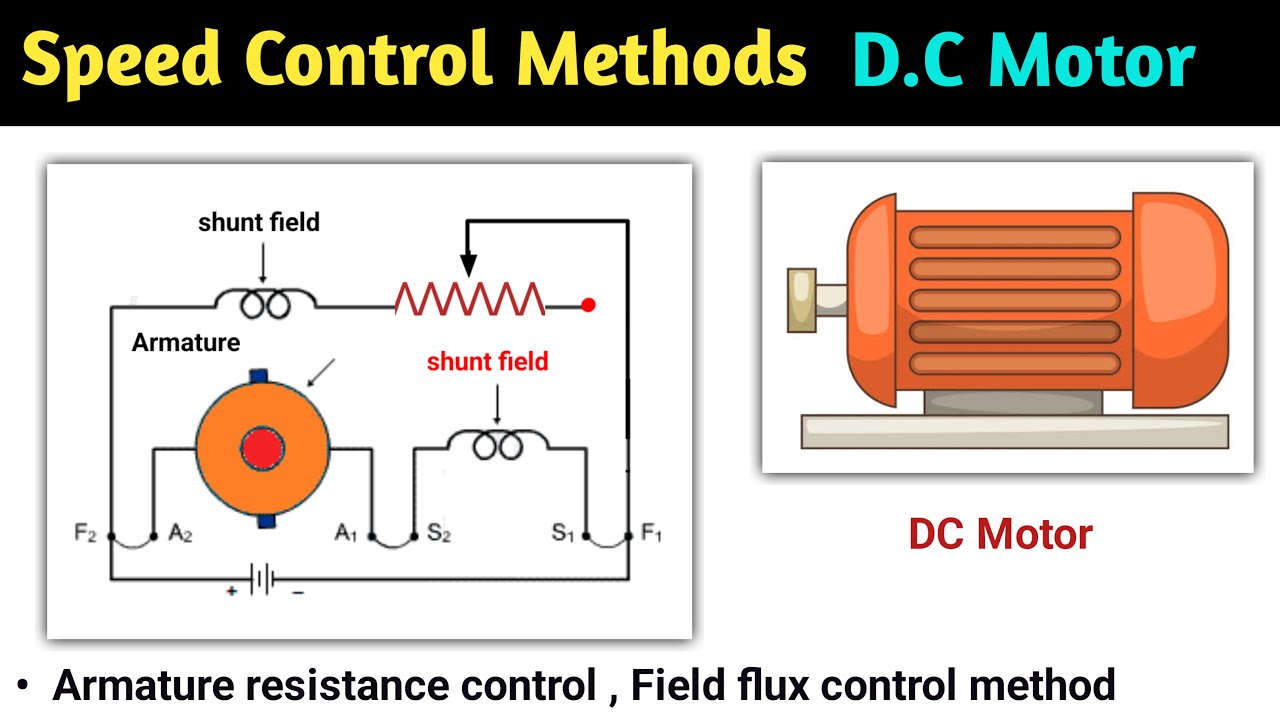
speed control of dc motor | speed control of dc shunt motor | dc motor speed control | series motor
Multivariable Closed Loop Control. Identification, Decoupled Control and MIMO Control with Router
Modul A1 Demo Praktikum Sistem Kendali

Electrical Machines - II

Synchronous Motor vs Asynchronous Motor | Synchronous vs Induction Motor | Come4Concepts
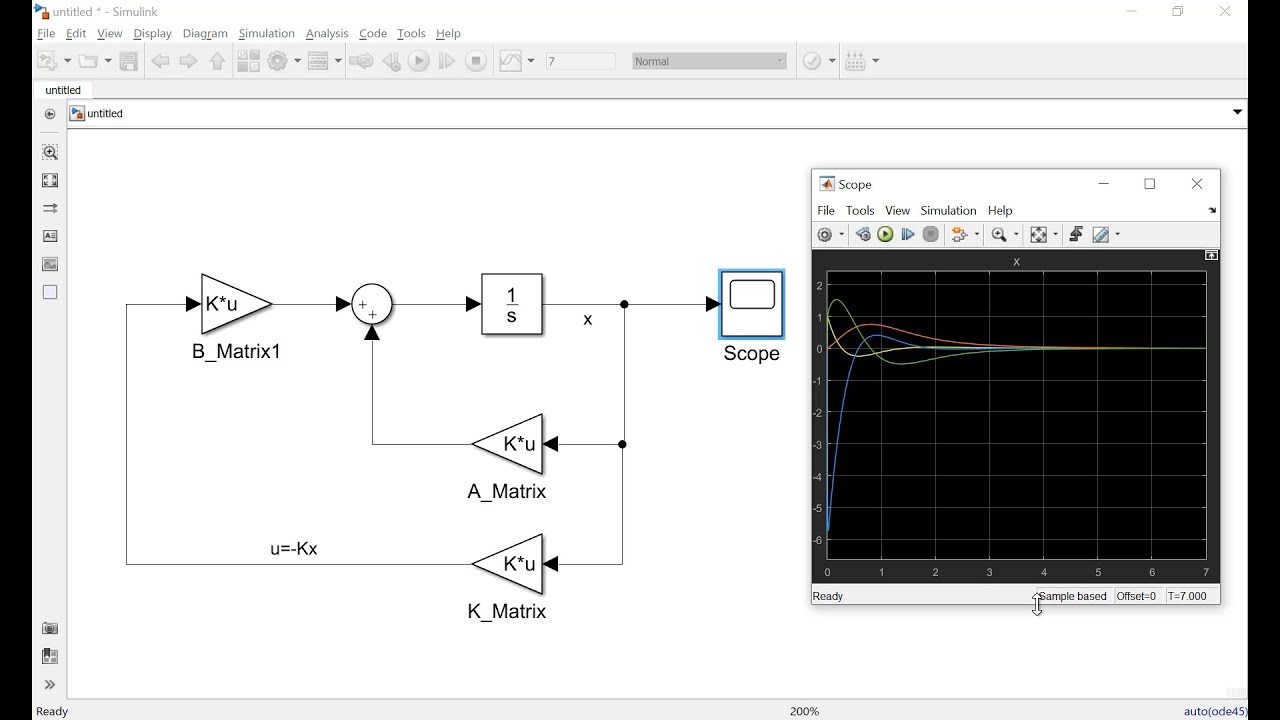
How to Make Simulation of Inverted Pendulum (Balancing Robot) Control in Simulink Matlab
5.0 / 5 (0 votes)
