EPA Explanation & Implementation
Summary
TLDRThis video extends the GJK algorithm, enhancing collision detection between convex polygons by calculating collision normals and depths for more effective responses. The expanded polytope algorithm iterates on the final simplex from GJK, allowing for the addition of supporting vertices to find the shortest normal. The 2D implementation is straightforward, focusing on edge proximity to the origin, while the 3D version addresses complexities with face management and edge uniqueness. Overall, this extension improves the handling of collisions in physics engines, illustrated through practical demonstrations.
Takeaways
- 😀 The GJK algorithm detects collisions between convex polygons but does not provide detailed information on the collision.
- 😀 An extension of GJK is introduced to determine the correct collision normal and depth, necessary for collision responses.
- 😀 The algorithm works with the final simplex from GJK, expanding it to find the shortest vector that nudges the shapes apart.
- 😀 The method for finding the collision normal in 2D involves determining the closest edge to the origin using dot products.
- 😀 In 2D, the normal vector is derived by swapping the x and y components and flipping a sign based on the winding order.
- 😀 The algorithm iteratively checks for support points further out in the direction of the collision normal until the closest normal is found.
- 😀 The 3D extension requires explicit face definitions, unlike 2D, where edges are implicit.
- 😀 To manage 3D collisions, a mesh-like structure is used to track faces and their associated vertices.
- 😀 When adding a supporting point in 3D, all faces pointing in the direction of the support point must be removed to avoid duplicates.
- 😀 The algorithm includes helper functions to calculate face normals and manage unique edges effectively.
Q & A
What is the main purpose of the GJK algorithm?
-The GJK (Gilbert-Johnson-Keerthi) algorithm is used to test for collisions between two convex polygons by determining whether the origin lies within a simplex formed by the two shapes.
Why is the extension of the GJK algorithm necessary?
-The extension is necessary because the GJK algorithm only detects collisions but does not provide the information needed to respond to those collisions, such as the normal and depth of the collision.
What is the significance of the term 'normal' in collision detection?
-In collision detection, the 'normal' refers to the shortest vector that can nudge the shapes apart, which is crucial for resolving collisions.
What is the expanding polytope algorithm?
-The expanding polytope algorithm is an extension of GJK that expands the simplex by adding vertices to find the closest face normal from the original polygon, improving the response to detected collisions.
How does the algorithm differentiate between 2D and 3D collision detection?
-In 2D, edges are implied by the order of the vertices, while in 3D, the algorithm needs to explicitly define faces since each vertex can be shared among multiple faces.
What is the role of the support function in the algorithm?
-The support function is used to find points further in the direction of the normal, helping to expand the simplex and ensuring that it accurately represents the collision geometry.
How is the normal of a vector determined in 2D?
-In 2D, the normal of a vector is determined by swapping its x and y components and flipping the sign of one component, which depends on the winding order.
What challenges arise when expanding a polytope in 3D?
-In 3D, the challenge is that when adding a vertex, it is necessary to repair the faces because duplicate faces can result from shared supporting points, leading to incorrect results.
Why is the winding order important in calculating normals?
-The winding order is important because it determines the direction of the normal. A correct winding order ensures that the normals point outward, which is essential for accurate collision responses.
What is the function of the 'unique edges' list in the algorithm?
-The 'unique edges' list is used to keep track of edges that should be preserved while repairing the polytope, ensuring that only relevant edges are stored to avoid duplicates.
Outlines

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードMindmap

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードKeywords

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードHighlights

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードTranscripts

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレード関連動画をさらに表示

Improving the GJK Algorithm for Faster and More Reliable Distance Queries Between Convex Objects
Game Dev: Collision Detection - Bounding Box

JavaFX and Scene Builder - Simple Collision Detection setup

Ethernet Transmitter Algorithm
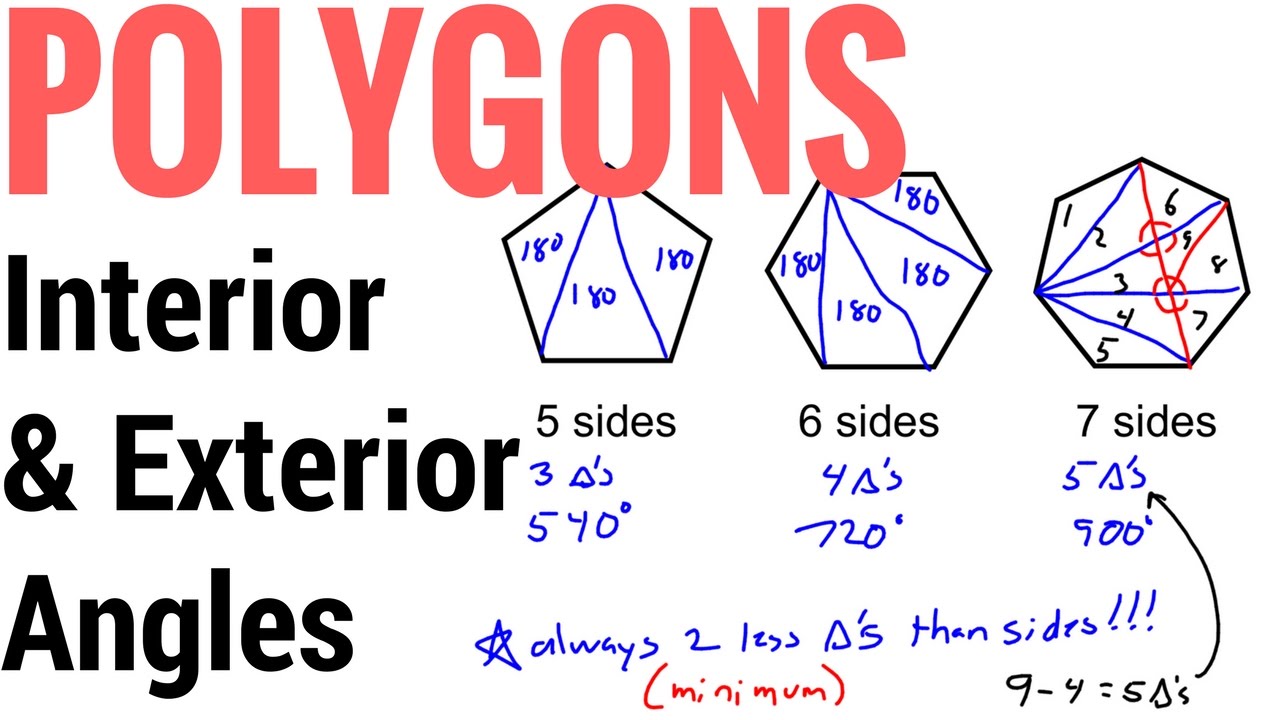
Interior and Exterior angles of polygons

DX100 - Collision Detect (Code 4315)
5.0 / 5 (0 votes)
