6.11 Implementing the Kalman filter for LGSSMs
Richard Turner
13 Apr 202118:36
The video is abnormal, and we are working hard to fix it.
Please replace the link and try again.
Please replace the link and try again.
Outlines

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードMindmap

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードKeywords

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードHighlights

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードNo information recorded
Transcripts

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレード関連動画をさらに表示

Special Topics - The Kalman Filter (3 of 55) The Kalman Gain: A Closer Look
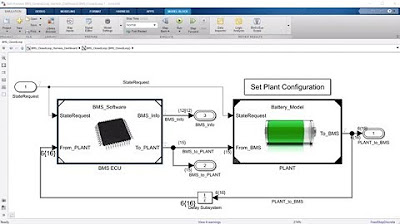
Battery Management System Development in Simulink
Extended Kalman Filter - Sensor Fusion #3 - Phil's Lab #37

Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Estimate Pose

Dynamic Positioning for Dummies - Kalman Filter & Error Computation (4)

Dynamic Positioning for Dummies - Overview (1)

14 | Measure angles with the MPU6050 accelerometer
Rate This
★
★
★
★
★
5.0 / 5 (0 votes)
関連タグ
カルマンフィルター線形モデル状態空間確率的ダイナミクスガウス分布フィルタリング予測ステップ更新ステップ数学的解説アルゴリズム