Servomotor Explicado
Summary
TLDREste video educativo explica cómo funcionan los servomotores, componentes esenciales en la ingeniería de precisión y robótica. Se describe cómo estos convertidores de energía eléctrica en mecánica permiten un control preciso de la posición a través de señales de control. Los diferentes tipos, como los de circuito cerrado y abierto, se comparan por su alcance de giro y aplicación. El vídeo también explora la relación entre el voltaje, el torque y la velocidad de rotación, y cómo los engranajes internos amplifican el torque. Finalmente, se muestra cómo programar un Arduino para controlar un servomotor con un potenciómetro, ofreciendo una visión práctica de su funcionamiento.
Takeaways
- 🔧 Los servomotores son utilizados para lograr un control preciso en aplicaciones como robótica y automatización.
- ⚙️ Los servomotores convierten energía eléctrica en energía mecánica a través de un tren de engranajes y un motor de corriente continua.
- 🔄 A diferencia de los motores de corriente continua, los servomotores no giran constantemente sino que responden a señales que controlan su posición.
- 🔒 Los servomotores de circuito cerrado permiten el control más preciso y son los más comunes en aplicaciones técnicas.
- 📏 El torque del servomotor se mide en kilogramos por centímetro y varía según la distancia desde el eje.
- 📈 El rendimiento del motor aumenta con un mayor voltaje, pero también existen límites que pueden hacer que el motor se bloquee.
- ⚡ La velocidad de rotación del servomotor depende del voltaje aplicado y se mide en segundos por cada 60 grados de rotación.
- 🛠️ Los engranajes dentro de un servomotor convierten la alta velocidad y bajo torque del motor en una salida de baja velocidad y alto torque.
- 📡 El controlador del servomotor utiliza señales de modulación de ancho de pulso para determinar la posición del motor.
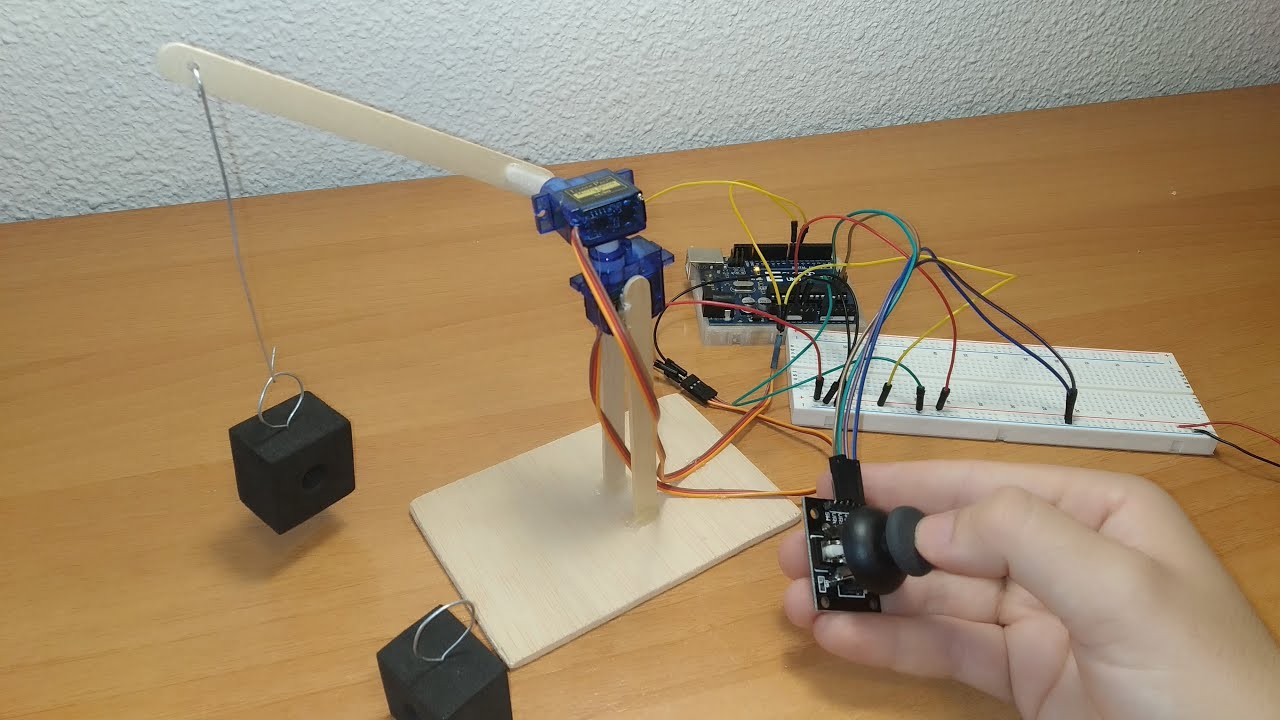
- 💻 Es posible controlar un servomotor con una placa Arduino, utilizando un potenciómetro para regular su posición.
Q & A
¿Qué es un servomotor y para qué se utiliza?
-Un servomotor es un tipo de motor que convierte energía eléctrica en energía mecánica. Se utiliza para lograr un control preciso en aplicaciones como robótica, automatización e incluso en la dirección de vehículos de control remoto.
¿Cómo se controla la posición de un servomotor?
-La posición de un servomotor se controla mediante un controlador que envía señales que indican al motor hasta dónde debe girar. Estas señales varían el ancho del pulso enviado al motor, lo que permite un control preciso de la rotación.
¿Cuál es la diferencia entre un motor de corriente continua (CD) y un servomotor?
-A diferencia de un motor de CD que gira constantemente cuando se conecta a una fuente de alimentación, un servomotor gira en función de las señales enviadas por un controlador, lo que permite un control más preciso de su posición.
¿Qué significa que un servomotor tenga un circuito cerrado?
-Un servomotor de circuito cerrado utiliza retroalimentación para ajustar su posición. Esto proporciona un control más preciso, ya que el motor se detiene una vez que alcanza la posición deseada.
¿Cómo afecta el torque en un servomotor?
-El torque indica cuánta fuerza puede aplicar el servomotor. Cuanto mayor sea el torque, mayor será la fuerza que puede aplicar. El torque también depende de la distancia desde el eje, siendo mayor a menor distancia del eje.
¿Qué sucede cuando un servomotor alcanza sus límites?
-Cuando un servomotor alcanza sus límites físicos, como cuando está bloqueado, la corriente aumenta drásticamente. Es importante no sobrepasar estos límites para evitar daños al motor.
¿Cómo influye el voltaje en el rendimiento de un servomotor?
-Cuanto mayor sea el voltaje aplicado a un servomotor, mayor será el torque que puede generar, lo que aumenta el rendimiento del motor. Además, un mayor voltaje también incrementa la velocidad de rotación.
¿Cómo funciona el tren de engranajes en un servomotor?
-El tren de engranajes en un servomotor convierte la alta velocidad y bajo torque del motor de CD en una salida de baja velocidad y alto torque. Esto se logra mediante una serie de engranajes de diferentes tamaños.
¿Qué papel juega el potenciómetro en un servomotor?
-El potenciómetro actúa como un sensor de posición en el servomotor. Cambia su resistencia conforme gira el engranaje final del servo, lo que permite al controlador determinar la posición actual del motor.
¿Cómo se programa un Arduino para controlar un servomotor?
-Se puede programar un Arduino para controlar un servomotor utilizando un potenciómetro como entrada. El Arduino lee la señal analógica del potenciómetro, convierte esa señal en un ángulo de rotación entre 0 y 180 grados, y ajusta la posición del servomotor en consecuencia.
Outlines

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードMindmap

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードKeywords

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードHighlights

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレードTranscripts

このセクションは有料ユーザー限定です。 アクセスするには、アップグレードをお願いします。
今すぐアップグレード関連動画をさらに表示

DIY ROBOTIC HAND #2 - EMG Controlled Arduino

Lego MINDSTORMS EV3 || Introducción #1: Aspectos Básicos

COMPONENTES ELECTRÓNICOS - SEGUNDA PARTE
GRUA con ARDUINO || PROYECTO con servomotores || Para principiantes [Explicado paso a paso]

Conceptos básicos de electrónica
Componentes De La CPU Y Su Funcionamiento
5.0 / 5 (0 votes)
