Drones | The complete flight dynamics
Summary
TLDRThis video script delves into the exhilarating world of drone flight mechanics. It explains how BLDC outrunner motors and propeller blades generate lift, enabling takeoff and hovering. The script clarifies the importance of counter-rotating propellers to neutralize torque and maintain stability. It also details how manipulating motor speeds controls yaw, pitch, and roll for directional control. Furthermore, it explores the physics behind moving the drone forward, sideways, and in circular patterns, providing a comprehensive look at the fascinating dynamics of quadcopter flight.
Takeaways
- 🚁 Flying a drone involves complex maneuvers and understanding its flight mechanics is essential for effective operation.
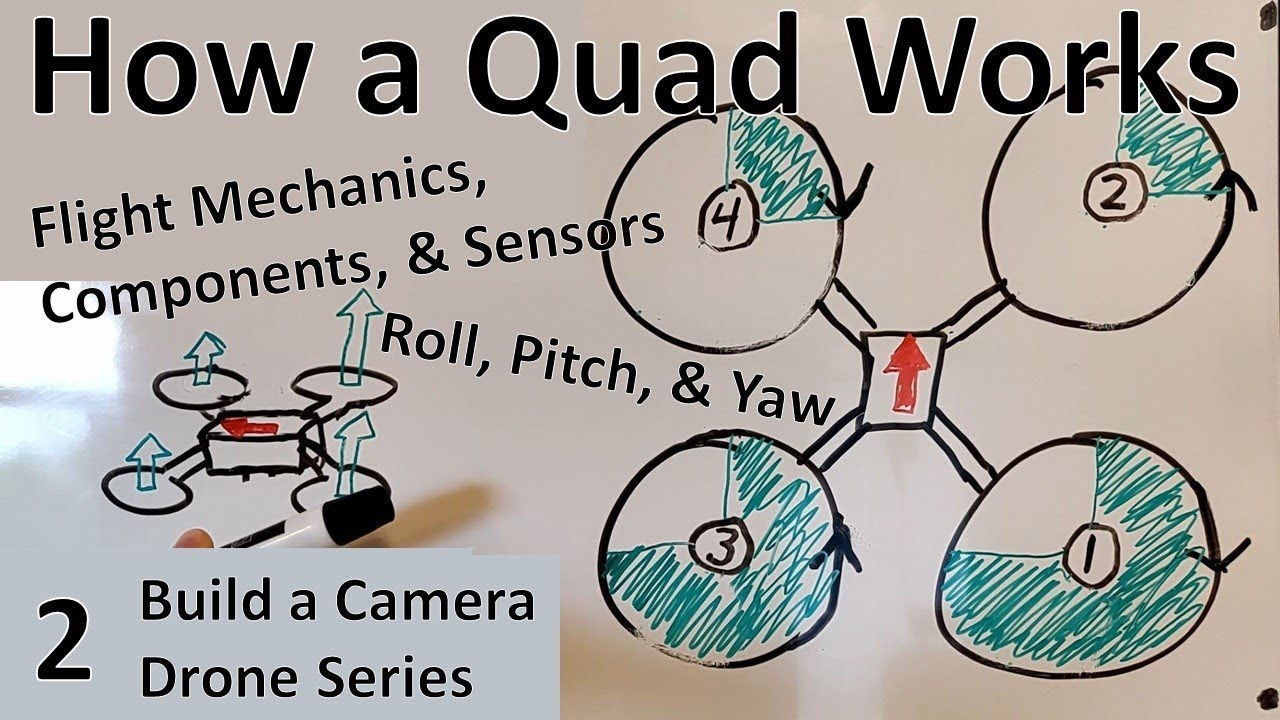
- 🛫 Drones utilize BLDC outrunner motors with propeller blades attached directly to the motor cover for lift generation.
- 🔄 The airfoil principle is key in drone flight, as it allows the propeller blades to generate lift force when air flows over them.
- 📈 The controller adjusts motor speed, which in turn affects the lift force produced by the propellers; higher speed results in greater lift.
- 🛫 Takeoff in a drone is achieved by increasing rotor speed until the collective lift force overcomes the drone's weight.
- 💫 Hovering is maintained by balancing the lift force with the drone's weight, achieved by adjusting rotor speed.
- 🔄 Opposing rotation of diagonally opposite propellers is necessary to counteract reaction torque and prevent the drone from spinning.
- 🌀 Yaw motion is achieved by varying the speed of one diagonal pair of propellers compared to the other, creating a net torque that spins the drone.
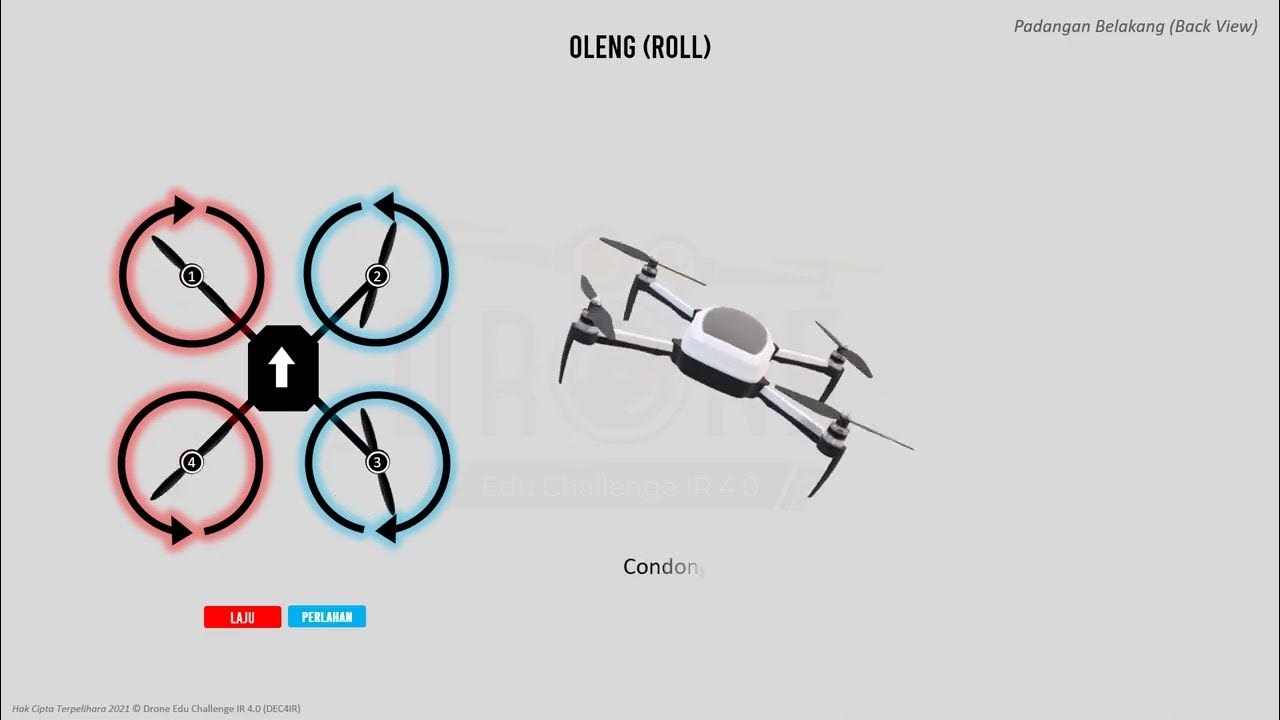
- 📊 Pitch and roll are controlled by adjusting the speed of the front and back, or side propellers respectively, to create a net torque that maneuvers the drone.
- 🔄 In both roll and pitch operations, the reaction torques from the motors cancel each other out, ensuring stable drone operation.
- 🌐 To move the drone forward or sideward, it must be pitched or rolled and then balanced vertically to counteract the horizontal component of the propeller force.
Q & A
What is the main purpose of the propeller blades on a drone?
-The propeller blades on a drone are the most important part, as they produce lift force when air flows over them due to the airfoil principle, allowing the drone to take off, hover, and maneuver.
How do BLDC motors, specifically outrunner types, contribute to a drone's flight mechanics?
-BLDC outrunner motors are used in drones because they have propeller blades attached directly to the motor cover, which allows for efficient conversion of electrical energy into mechanical energy to generate lift.
What is the significance of the lift force produced by the drone's blades?
-The lift force produced by the drone's blades is crucial for overcoming the weight of the drone, enabling it to lift off the ground, hover, and perform various maneuvers.
How does the controller modify the drone's flight?
-The controller is used to modify the motor speed; a greater blade speed results in a greater lift force, allowing the drone to change its altitude and perform different movements.
What is the 'climbing stage' in drone flight?
-The 'climbing stage' is when the rotor speed is increased to the point where the collective lift force produced by the blades overcomes the weight of the drone, causing it to lift off the ground.
Why do opposite pairs of propellers on a drone rotate in different directions?
-Opposite pairs of propellers rotate in different directions to counteract the reaction torque that would otherwise cause the drone body to spin, maintaining stability during flight.
What is the role of Newton's third law of motion in drone flight mechanics?
-Newton's third law of motion explains that for every action, there is an equal and opposite reaction. In drone flight, this means that as the rotors apply a torque to the air, the stator receives an equal and opposite torque, which must be balanced to prevent the drone from spinning.
How does a drone achieve yaw motion?
-Yaw motion is achieved by rotating one diagonal pair of propellers at one speed and the other pair at a different speed, creating a net reaction torque that causes the drone body to spin.
What controls the pitch and roll of a drone?
-The pitch and roll of a drone are controlled by the same stick on the remote control. By spinning the front and back propellers at different speeds, the drone pitches, and by spinning the side pairs at different speeds, the drone rolls.
How can a drone move in a perfect circle?
-A drone can move in a perfect circle by applying a force that is always perpendicular to its velocity, which can be achieved by combining pitch and roll movements to create the necessary centripetal force.
How does a drone maintain balance during forward or sideward movement?
-To maintain balance during forward or sideward movement, the drone must balance the gravitational force with the vertical component of the propeller force, and the horizontal component of the propeller force must be matched by the drag force as the drone moves.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantVoir Plus de Vidéos Connexes




5.0 / 5 (0 votes)
