ME396 2024 11 22 Advisor Review Video
Summary
TLDROver the past two weeks, the team has worked collaboratively on designing an innovative four-wheel steering system. The design incorporates both mechanical and electrical components, with front steering controlled by a rack and pinion system and rear steering using a servo motor based on input from sensors. The system includes a lockout mechanism that disengages four-wheel steering at high speeds for safety. Control is managed through paddle switches on the steering wheel, allowing the driver to toggle between front-wheel and four-wheel steering at different speeds. The project is progressing with ongoing research into sensor integration and system automation.
Takeaways
- 😀 The team spent two weeks developing design sketches based on prior research to create a final design for a four-wheel steering system.
- 😀 The steering system features a rack-and-pinion setup for both the front and rear wheels, with the rear controlled by a servo motor.
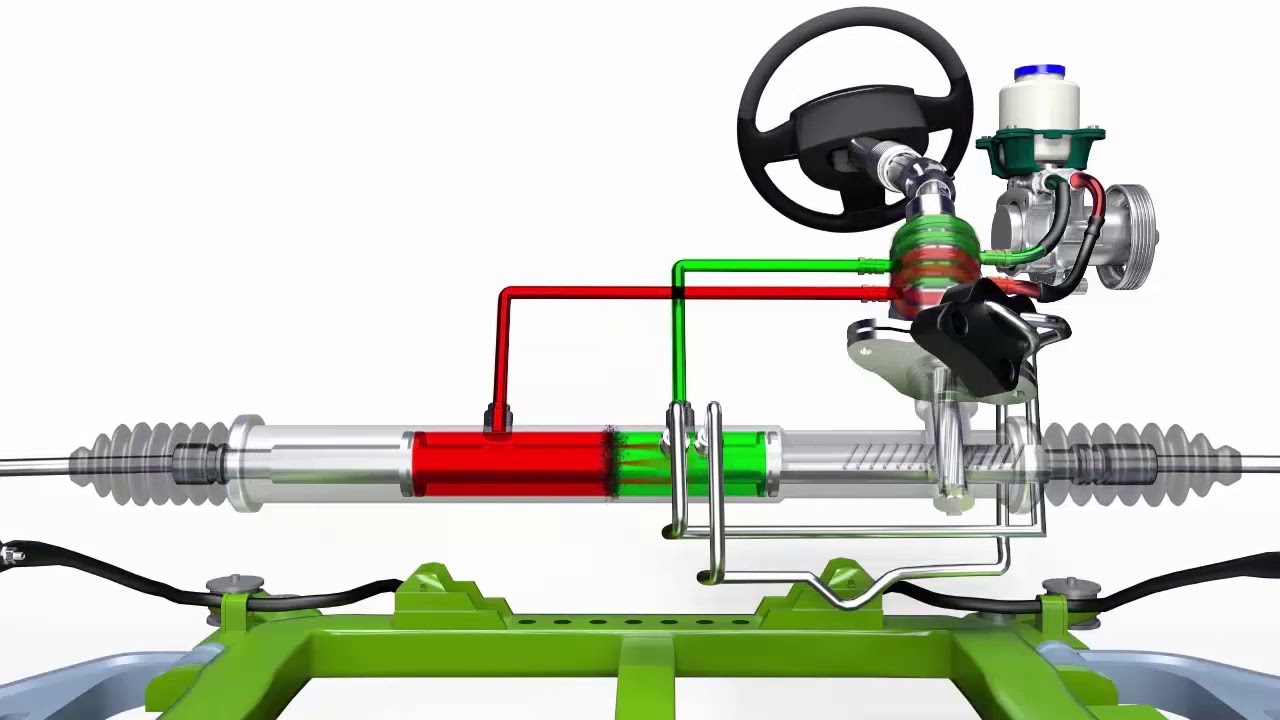
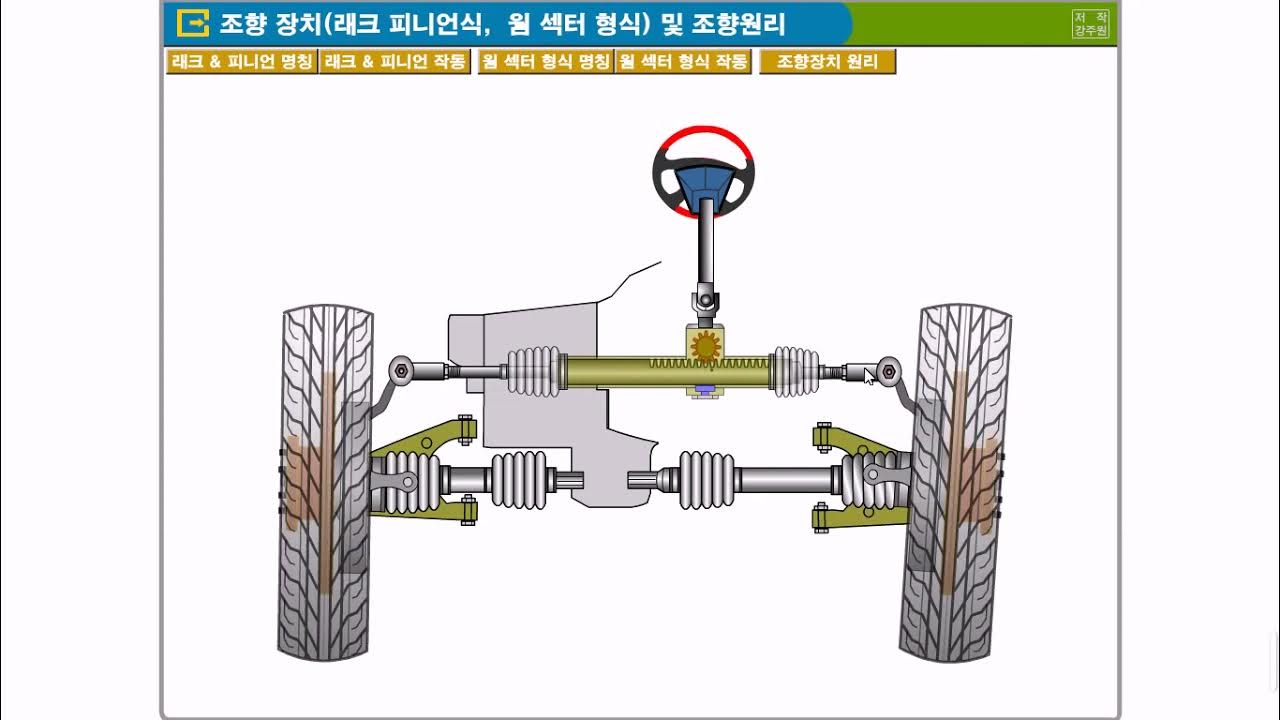
- 😀 The manual steering system uses a simple gear set where turning the steering wheel moves the front tires through a rack mechanism.
- 😀 The rear wheels are controlled electronically via a servo motor, which receives inputs from a sensor on the front steering wheel.
- 😀 A steering angle sensor is integrated to track the angle of the wheels, and data from this sensor helps adjust the rear wheel steering dynamically.
- 😀 A lever on the steering wheel can engage or disengage the four-wheel steering system, with an LED indicating the system’s status.
- 😀 An automatic disengagement of four-wheel steering occurs based on the car's velocity, using sensors to measure the wheel’s rotational speed.
- 😀 The final design included switches on the steering wheel for controlling the four-wheel steering system, with additional paddles for manual operation.
- 😀 The team explored both mechanical (lever-based) and electrical (sensor-based) lockout systems to control the four-wheel steering engagement.
- 😀 Collaboration across team members led to a design that integrates manual control with automatic features, such as adjusting steering based on speed and angle.
- 😀 The team plans to refine the system further, ensuring both safety and ease of use while maintaining a balance between mechanical and electronic components.
Q & A
What is the main objective of the team's design?
-The main objective is to create a steering system with both manual and electromechanical components, allowing for both front and rear wheel control, with features like automatic disengagement of the four-wheel steering at high speeds.
What type of steering system is used for the front wheels?
-The front wheels use a manual rack and pinion system, where the steering wheel turns a gear, which moves the rack and steers the front wheels.
How does the rear wheel steering system work?
-The rear wheel steering system is electromechanical, using a servo motor controlled by a sensor on the steering wheel, which communicates the steering angle to adjust the back wheels.
What is the purpose of the sensors in the design?
-The sensors measure the steering angle and wheel speed, allowing for automatic adjustments to the steering system based on the vehicle's speed and the driver's input.
How is the speed of the car determined in the design?
-The car's speed is determined by measuring the angular velocity of the tires using sensors on the wheels, which helps calculate the translational velocity of the car.
How does the team plan to control the four-wheel steering?
-The team uses a paddle system on the steering wheel to engage and disengage the four-wheel steering. These paddles control the system manually, while automatic disengagement occurs based on speed data.
What modifications were made to the initial design proposal?
-The initial lever switch for engaging and disengaging the four-wheel steering was replaced by paddles for better ergonomics, making the system easier to use, especially during high-speed driving.
How does the lockout system work in the design?
-The lockout system can be either mechanical or electrical. The mechanical version uses a lever to engage or disengage the system, while the electrical version uses sensors to automatically lock or unlock the system based on the speed and steering angle.
What were the challenges faced during the design process?
-Challenges included ergonomic concerns, particularly with the design of the switch for the steering system. Additionally, some members were affected by illness, which delayed their contributions to the project.
Why is the steering wheel designed with paddles instead of a central switch?
-Paddles were chosen for their ergonomic benefits, allowing for easy engagement and disengagement of the four-wheel steering without the need to move hands off the wheel, which is crucial during high-speed driving.
Outlines

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantMindmap

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantKeywords

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantHighlights

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantTranscripts

Cette section est réservée aux utilisateurs payants. Améliorez votre compte pour accéder à cette section.
Améliorer maintenantVoir Plus de Vidéos Connexes
Steering Rack

Bendix: How a Steering Gear Works (BW5071)

A320 Nose Wheel Steering Explained | A320 Landing Gear
Cara Kerja Sistem Kemudi Jenis Rack and Pinion & Jenis Recirculating Ball MUDAH UNTUK DI PELAJARI

Huawei Maextro S800 Advanced AWD System for Ultimate Traction Control

The Difference Between 4WD, AWD, and 2WD (Drivetrain Comparison)
5.0 / 5 (0 votes)
