Cómo hacer un control de un Servomotor cada 45 grados con ARDUINO | TINKERCAD | ICMA KIDS
Summary
TLDREn este video, se presenta un proyecto de control de posición de un servomotor utilizando Arduino y LEDs. Se configura un circuito con un Arduino, un servomotor y cinco LEDs de diferentes colores para indicar ángulos de 45 grados cada uno. Los LEDs se conectan a los pines digitales 3 a 7 del Arduino, mientras que el servomotor se conecta a los pines de alimentación y a un pin digital para su control. El código mencionado en la descripción del video permite simular el movimiento del servomotor y el encendido de los LEDs de forma correspondiente, mostrando una forma visual de los ángulos de giro del servomotor hasta 180 grados.
Takeaways
- 🎥 El video muestra cómo controlar la posición de un servomotor en intervalos de 45 grados utilizando LEDs como indicadores.
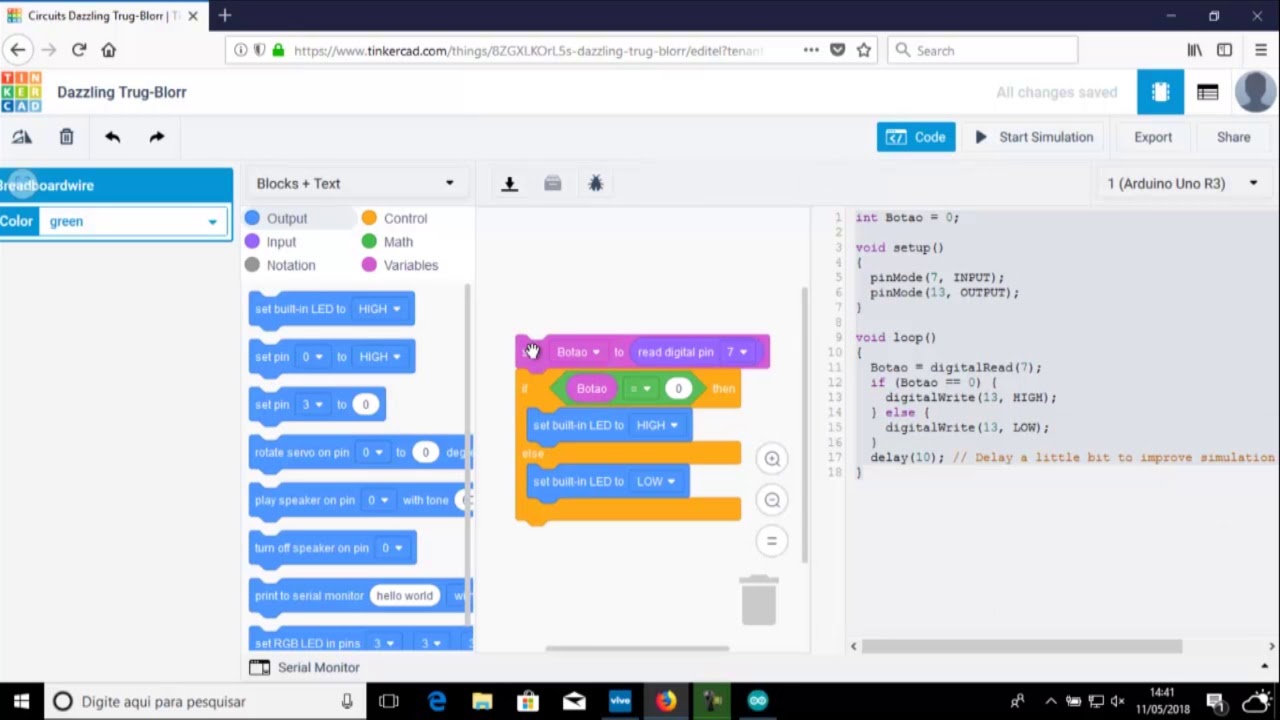
- 🛠️ Se inicia una sesión en Tinkercad para diseñar el circuito necesario para el proyecto.
- 🔌 Se utiliza una placa de pruebas y un Arduino para construir el circuito.
- 🔆 Se seleccionan cinco LEDs para el proyecto, cambiando su color para diferenciarlos y mostrar el grado de apertura del servomotor.
- 🔴 Los LEDs se conectan a los pines digitales del Arduino, desde el pin 3 hasta el pin 7.
- ⚠️ Se añaden resistencias de 1 kohm a los LEDs para protegerlos y asegurar su correcto funcionamiento.
- 🔌 El servomotor se conecta a la placa de pruebas, con el cable negro al negativo y el cable rojo al positivo.
- 🔴 El cable de salida del servomotor se conecta al pin digital 2 del Arduino, utilizando un cable de color naranja.
- 🔋 Se conecta el positivo de la placa de pruebas a los 5 volts del Arduino y el negativo a GND.
- 💻 Se proporciona un código en la descripción del video para controlar el proyecto, que se debe copiar y pegar en el Arduino.
- 📈 Al iniciar la simulación, los LEDs se encendrán y apagarán según la posición del servomotor, mostrando los 180 grados de apertura en intervalos de 45 grados.
Q & A
¿Qué se va a controlar en el video de YouTube?
-Se va a controlar la posición de un servomotor en intervalos de 45 grados.
¿Cuál es el propósito de los LEDs en el proyecto?
-Los LEDs sirven como indicadores para mostrar la posición actual del servomotor en intervalos de 45 grados.
¿Qué herramienta o plataforma se utiliza para iniciar el proyecto?
-Se utiliza Tinkercad para iniciar sesión y comenzar el proyecto.
¿Qué dispositivo se usa para el proyecto y cómo se conecta a los LEDs?
-Se usa un Arduino y se conecta a los LEDs desde el pin digital 3 hasta el pin digital 7.
¿Cuántas resistencias de 1 kohm se utilizan en el proyecto y para qué?
-Se utilizan cinco resistencias de 1 kohm, una para cada LED, para protegerlos y regular el flujo de corriente.
¿Cómo se diferencian los LEDs para saber qué grado están marcando?
-Los LEDs se cambian de color para diferenciarlas y indicar claramente qué grado están marcando.
¿Cuál es el rango total de movimiento del servomotor en el proyecto?
-El servomotor tiene un rango total de movimiento de 180 grados.
¿Cómo se conecta el servomotor al Arduino en términos de pines y cables?
-El cable café del servomotor se conecta al negativo de la placa de pruebas, el cable rojo al positivo y la salida del servomotor al pin digital número 2 del Arduino.
¿Qué color se le cambia al cable rojo del servomotor y por qué?
-Se le cambia el color rojo por naranja para facilitar la identificación de la conexión en el pin digital 2 del Arduino.
¿Dónde se puede encontrar el código utilizado en el proyecto?
-El código se encuentra en la descripción del video de YouTube.
¿Cómo se verifica el funcionamiento del proyecto?
-Se inicia una simulación y se observa cómo los LEDs se encienden y se apagan a medida que el servomotor avanza en intervalos de 45 grados.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraVer Más Videos Relacionados

GARAJE CON SENSOR DE DISTANCIA
PROYECTO RADAR con ARDUINO utilizando SENSOR de ULTRASONIDOS [explicado paso a paso] +códigos

Uso del receptor Infrarrojo Arduino Simulador online TinkerCAD
Arduino desde cero en Español - Capítulo 6 - Servomotor (conexión, modelos, ajustes para uso óptimo)

Cómo Hacer Cubo De LED 3x3x3 (muy fácil de hacer)
Arduino - Aula 13 - Experimento 3 - Semáforo
5.0 / 5 (0 votes)