Robótica Industrial | Laboratorio 4 Funciones para determinar características geométricas de objetos
Summary
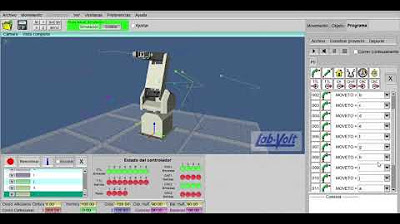
TLDREl video trata sobre cómo configurar una cámara y un robot para realizar procesamiento de imágenes. El presentador explica los pasos necesarios para ajustar las propiedades de la cámara, como brillo, contraste y exposición, así como la secuencia de operaciones para mejorar la imagen. Además, se muestra cómo agregar modelos y generar secuencias para analizar las imágenes y obtener resultados precisos. También se mencionan herramientas de software para ubicar, contar y procesar imágenes, con recomendaciones sobre cómo ajustar los parámetros para obtener mejores resultados.
Takeaways
- 🤖 Configurar un robot: Se menciona la necesidad de configurar un robot térmicamente y acceder a la configuración del sistema.
- 📸 Uso de la cámara: Se explica cómo cambiar la configuración de la cámara predeterminada y agregar una cámara manualmente si es necesario.
- 👁️ Visión expandida: Se habla sobre la expansión de la visión y cómo se relaciona con la percepción general del robot.
- 🛠️ Configuración geométrica: Se detalla cómo configurar la geometría de la cámara y cómo se relaciona con el robot y el trabajo.
- 🌄 Procesamiento de imagen: Se aborda el concepto de secuencia y cómo se utiliza para establecer propiedades como brillo, contraste y exposición.
- 🎨 Filtro de colores: Se menciona el uso de filtros de colores en la cámara y cómo afectan a la imagen.
- 📈 Evaluación de resultados: Se discute cómo se evalúan los resultados de la imagen procesada y se enfatiza la importancia de no sobresaturar el sistema con información.
- 🔍 Detección y ubicación: Se explica cómo el software ayuda a ubicar, contar e inspeccionar objetos en la imagen.
- 📊 Matriz de puntajes: Se habla sobre cómo se utiliza una matriz para evaluar la similitud de una imagen con un modelo y cómo se interpreta el puntaje.
- 🔄 Creación de nuevas secuencias: Se menciona la capacidad de generar nuevas secuencias y cómo se pueden usar para mejorar el rendimiento del robot.
Q & A
¿Cuál es el primer paso para configurar el sistema en el video?
-El primer paso es ingresar a la configuración del sistema y luego acceder a la sección de visión.
¿Qué se debe hacer si no se tiene una cámara preconfigurada en el proyecto?
-Si no se tiene una cámara preconfigurada, se debe agregarla manualmente y modificar la configuración predeterminada por la específica de la cámara que se esté utilizando.
¿Qué importancia tiene la secuencia en el procesamiento de imagen?
-La secuencia permite configurar propiedades como brillo, contraste, tiempo de exposición y filtros de color, esenciales para el procesamiento adecuado de la imagen.
¿Qué se debe hacer cuando se configura una cámara virtual para simular trabajo?
-Aunque no se tenga una cámara conectada físicamente, siempre se debe configurar una nueva cámara virtual para realizar las simulaciones.
¿Qué recomienda el narrador sobre el uso de la información para no sobrecargar el sistema?
-Se recomienda utilizar la mayor cantidad posible de información útil sin sobresaturar el sistema, ya que esto no mejora los resultados.
¿Cómo se identifica un buen modelo en el procesamiento de imágenes?
-Un buen modelo es aquel cuya imagen es puntuada adecuadamente por el software, y si obtiene más de 700 puntos, se considera aceptable.
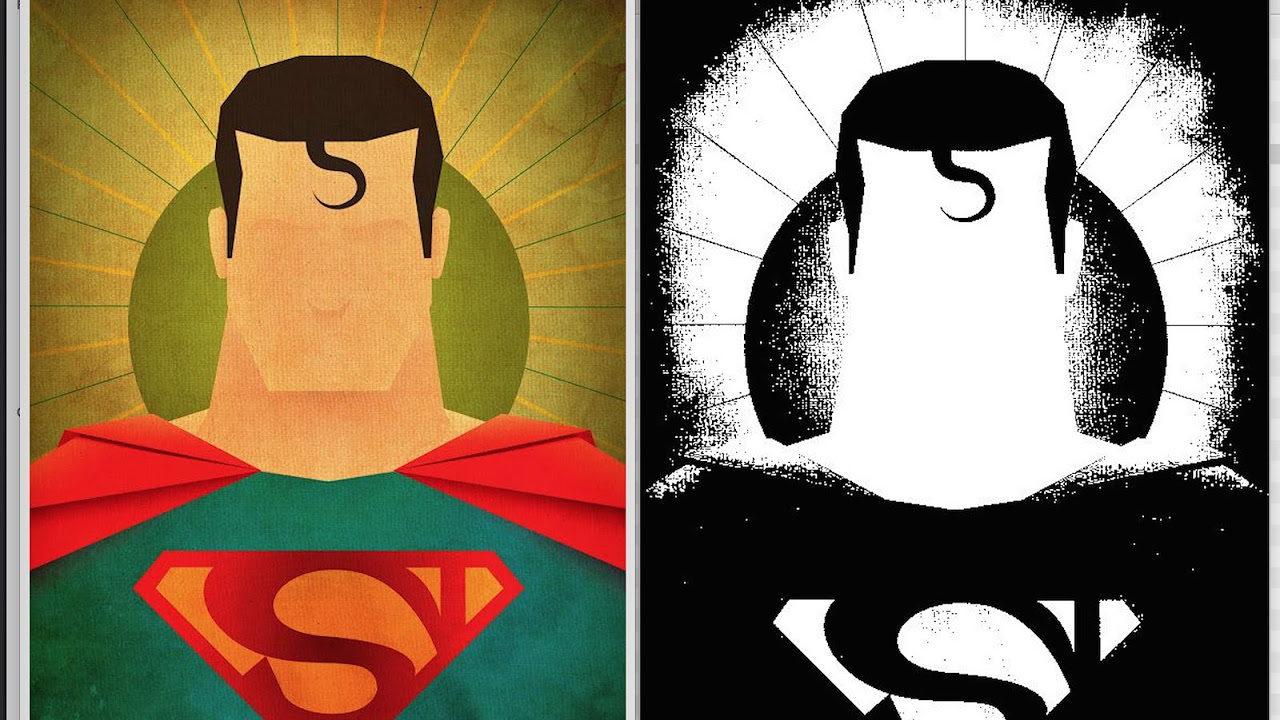
¿Qué herramienta se utiliza para transformar una imagen con muchos colores a dos colores?
-Se utiliza la herramienta 'Blot', que reduce una imagen con múltiples colores a solo dos colores, simplificando el procesamiento de la imagen.
¿Qué recomendación se da sobre el nivel de detalle para los modelos de imagen?
-Se recomienda establecer el nivel de detalle en un valor mediano, ya que esto tiende a ser más efectivo sin requerir detalles demasiado finos.
¿Qué se debe hacer para filtrar áreas no útiles en una imagen procesada?
-Es necesario eliminar áreas pequeñas o esquinas que no son útiles estableciendo un área mínima de 2,500 píxeles para obtener resultados más precisos.
¿Qué tarea práctica se recomienda realizar al final del proceso?
-Se recomienda cargar imágenes predeterminadas en el sistema y crear secuencias para realizar operaciones como 'Blot', comparando resultados entre diferentes imágenes para comprender mejor las herramientas disponibles.
Outlines

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraMindmap

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraKeywords

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraHighlights

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahoraTranscripts

Esta sección está disponible solo para usuarios con suscripción. Por favor, mejora tu plan para acceder a esta parte.
Mejorar ahora


5.0 / 5 (0 votes)