Bagian 2 Metode Numerik untuk Fisika: Metode False Position (Posisi Palsu) #kuliahonline
Summary
TLDRIn this tutorial, the False Position Method (Regula Falsi) for solving nonlinear equations is explored, with a comparison to the Bisection Method. The video covers the mathematical foundation of the method, including triangle similarity, and demonstrates its use through a practical example involving a falling object with air resistance. The process involves defining the function, setting error tolerance, applying the formula, and iterating until the error is sufficiently small. The video also highlights the efficiency of this method, showing how it converges faster than the Bisection Method with fewer iterations, using tools like spreadsheets and Python for computation.
Takeaways
- 😀 The video explains how to find the root of nonlinear equations using the False Position (Regula Falsi) method.
- 😀 False Position is also known as the linear interpolation method and is similar to the bisection method but estimates the root using a straight line between two points.
- 😀 The method starts by selecting two initial guesses, xL and xR, such that f(xL) * f(xR) < 0, indicating a root exists between them.
- 😀 The root estimate, x_root, is calculated using the formula: x_root = xR - [f(xR) * (xL - xR)] / [f(xL) - f(xR)].
- 😀 After estimating the root, the interval is updated based on which side contains the root, similar to the bisection method.
- 😀 The relative error is calculated as |x_root_new - x_root_old| / |x_root_new| * 100% to check convergence.
- 😀 Iteration continues until the relative error is less than the specified tolerance or until the maximum number of iterations is reached.
- 😀 The method is demonstrated with a physics example: calculating the drag coefficient (CD) for a falling object with known mass, velocity, and gravity.
- 😀 Implementation can be done in spreadsheets (Excel) or programming languages like Python, with very small relative error achieved in a few iterations.
- 😀 The main advantage of False Position over bisection is faster convergence for functions that are approximately linear between xL and xR.
Q & A
What is the main topic of the video transcript?
-The main topic is solving nonlinear equations using the false position method, also known as the regula falsi or linear interpolation method.
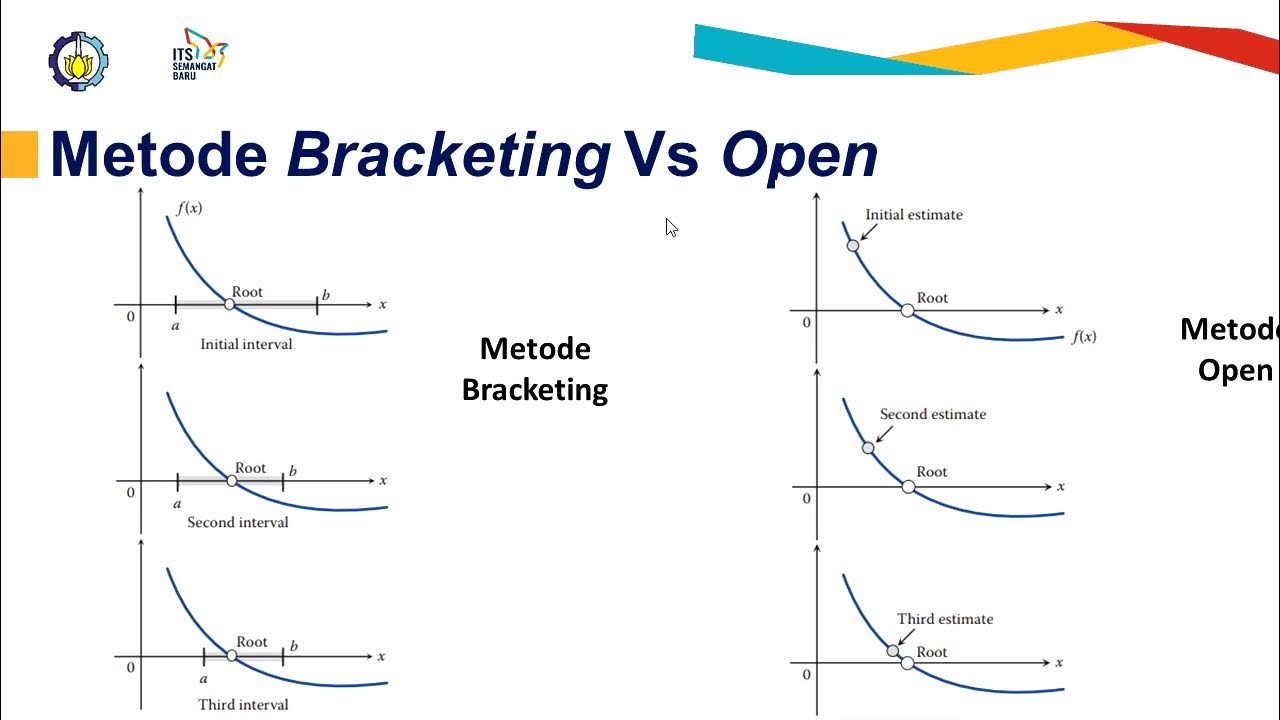
How does the false position method differ from the bisection method?
-While the bisection method finds the root by dividing the interval in half, the false position method estimates the root by drawing a straight line between the function values at the interval endpoints and finding its intersection with the x-axis.
Why is the false position method also called the linear interpolation method?
-Because it estimates the root by connecting two points on the function with a straight line and using the line's intersection with the x-axis as the root, which is a form of linear interpolation.
What is the initial requirement for choosing XL and XR in the false position method?
-The function values at XL and XR must have opposite signs, i.e., f(XL) * f(XR) < 0, to ensure that a root exists between them.
What formula is used to calculate the new estimate of the root in the false position method?
-The new root estimate X_new is calculated as: X_new = XR - [f(XR) * (XL - XR)] / [f(XL) - f(XR)].
How is the error calculated in the false position method?
-Error is calculated as the relative difference between the current and previous root estimates: Error = |X_new - X_old| / X_new * 100%.
When should the iteration in the false position method stop?
-Iteration stops when the error becomes smaller than the specified tolerance or when the maximum number of iterations is reached.
How does one decide which side of the interval to keep after each iteration?
-Check the sign of f(X_new). If f(XL) * f(X_new) < 0, keep the left interval (XR = X_new). If f(XR) * f(X_new) < 0, keep the right interval (XL = X_new).
What real-world example is used in the transcript to demonstrate the false position method?
-The example involves calculating the drag coefficient (CD) of a falling object with a known mass, falling velocity, and time.
What are the advantages of using the false position method over the bisection method?
-The false position method often converges faster than bisection for functions that are approximately linear because it uses linear interpolation instead of simply halving the interval.
How can the false position method be implemented using software?
-It can be implemented using spreadsheets or programming languages like Python by applying the same steps as in the algorithm, with adjustments to calculate X_new differently than bisection.
What is the significance of using similar triangles in explaining the false position method?
-The concept of similar triangles is used to derive the linear interpolation formula, showing how the ratio of distances along the x-axis corresponds to the ratio of function values, leading to the estimate of the root.
Outlines

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنMindmap

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنKeywords

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنHighlights

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنTranscripts

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنتصفح المزيد من مقاطع الفيديو ذات الصلة
S. Y. B. SC. (Comp.Sci.) (Paper - II: Numerical Techniques) Ch1-Algebraic & Transcendental Eq.(Lec1)
8. METODE LELARAN TITIK TETAP - FIX POINT ITERATION - METODE NUMERIK

Solucion Sistema Ecuaciones No Lineales (Punto Fijo Multivariable) + Excel
Fisika Komputasi 1: Metode-metode Akar persamaan Secara Numerik

Optimisasi Statistika - Kuliah 6 part 1

Metode Numerik - Metode Biseksi
5.0 / 5 (0 votes)
