14 | Measure angles with the MPU6050 accelerometer
Summary
TLDRThis video guides viewers through the process of building an Arduino-controlled quadcopter drone, focusing on how to measure roll and pitch angles using the MPU 6050 gyroscope and accelerometer. It contrasts two methods of angle measurement—integrating rotation rates and accelerometer trigonometry—highlighting their limitations. While integrating rotation rates causes increasing errors over time, accelerometer measurements are highly sensitive to vibrations, particularly during flight. The video introduces the need for a more robust solution, such as combining both methods using a Kalman filter to improve accuracy and stability. The tutorial provides hands-on instructions and code to test the system.
Takeaways
- 😀 The script explains how to build a flight controller for a quadcopter using the MPU 6050 gyroscope and accelerometer.
- 😀 The previous controller design stabilized the quadcopter using rotation rates, but it did not return to a level pitch automatically when releasing the controls.
- 😀 The new flight controller aims to directly control roll and pitch angles, making it more user-friendly and stable.
- 😀 Measuring angles using only integrated rotation rates leads to drift and error accumulation over time.
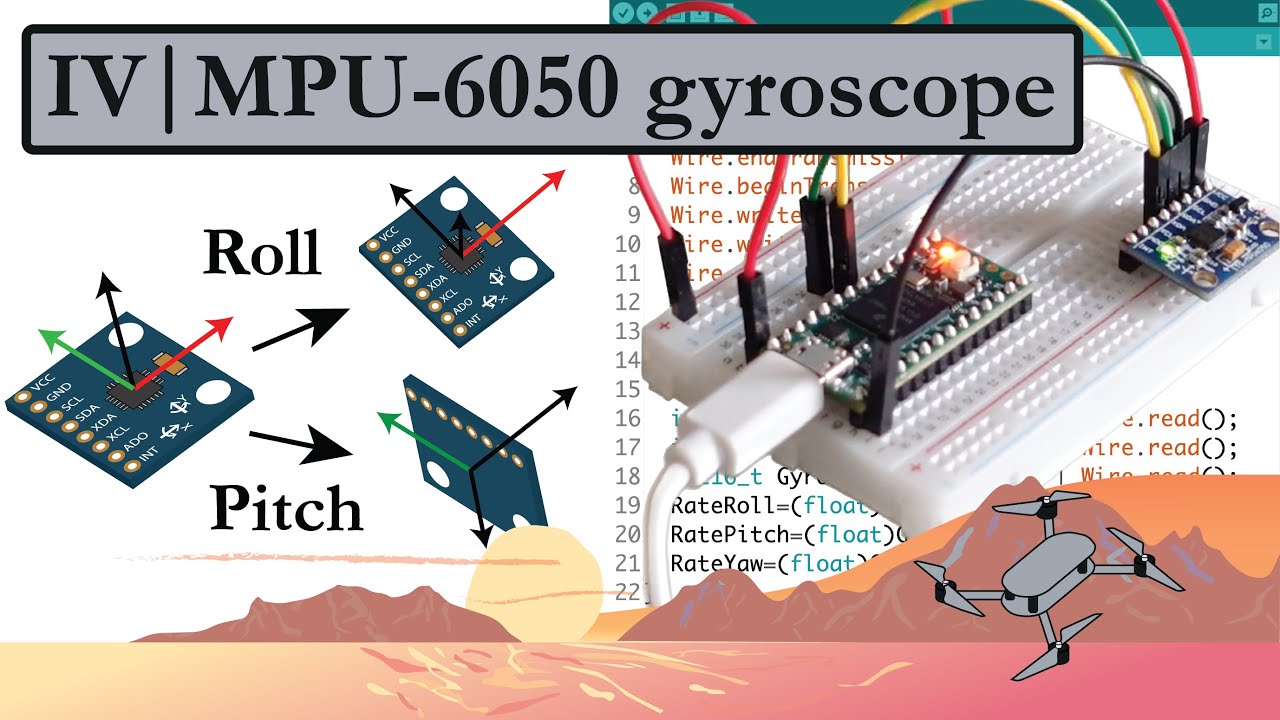
- 😀 Accelerometers can help measure angles by detecting gravitational acceleration along the X, Y, and Z axes.
- 😀 By applying trigonometric calculations to accelerometer data, you can estimate roll and pitch angles more accurately.
- 😀 The accelerometer alone is not sufficient for a stable flight controller, as it is prone to errors due to vibrations during flight.
- 😀 Integration of rotation rates provides a solution for angle measurements that is not sensitive to vibrations, but it results in increasing error over time.
- 😀 A Kalman filter is introduced as a solution to combine both accelerometer and gyroscope data to reduce individual measurement errors and improve stability.
- 😀 The Arduino code for the project involves calibrating the sensor and adjusting for measurement discrepancies to ensure accurate angle readings.
- 😀 The next video will focus on using the Kalman filter to merge accelerometer and gyroscope measurements, eliminating their individual drawbacks for more reliable flight control.
Q & A
What is the main goal of the video in this series?
-The main goal of the video is to explain how to build an Arduino-based quadcopter drone, focusing specifically on measuring angles using the MPU6050 gyroscope and accelerometer to design a flight controller.
How does the previous flight controller differ from the stabilized mode controller?
-The previous flight controller stabilizes the quadcopter based on rotation rates (degrees per second), which requires manual control over the rate. In contrast, the stabilized mode controller directly controls the roll and pitch angles, stabilizing them to a level position when the stick is released.
Why is simply integrating rotation rates not an effective method to measure angles?
-Integrating rotation rates causes two main problems: it accumulates measurement errors over time, causing the angle to drift, and it also fails to account for the change in the quadcopter’s angle when moving along the z-axis during motion.
How does the accelerometer in the MPU6050 help in measuring angles?
-The accelerometer measures the acceleration along the X, Y, and Z axes, allowing the calculation of roll and pitch angles using trigonometric equations based on the gravitational acceleration experienced by the sensor.
What is the formula to calculate roll angle from accelerometer values?
-To calculate the roll angle, you use the tangent of the angle, where the opposite side is the acceleration in the Y direction and the adjacent side is calculated using Pythagoras' theorem, leading to a specific equation for roll angle calculation.
What are the key steps in configuring the MPU6050 for this project?
-Key steps include configuring the accelerometer’s full-scale range to 8G, selecting the appropriate sensitivity for the accelerometer (4096 LSB per G), and writing code to read the accelerometer values from the sensor’s registers.
What issue arises when accelerometer measurements are affected by vibrations?
-Vibrations cause sharp peaks and drops in the measured roll and pitch angles, leading to inaccuracies in angle calculations. These vibrations are inevitable when flying a quadcopter due to the motors' influence.
What is the problem with using only rotation rate integration for measuring angles?
-The main problem with using only rotation rate integration is that it accumulates error over time, causing the angle measurements to drift continuously and making it unreliable for accurate angle control.
What was the purpose of calibrating the accelerometer in the script?
-The accelerometer calibration ensures the measured accelerations are as close as possible to 1G in all directions when the sensor is tilted, correcting the small deviations that occur due to sensor inaccuracies.
What is the next step after addressing the issues with accelerometer and rotation rate methods?
-The next step, as mentioned in the video, is to combine both accelerometer and rotation rate measurements using a Kalman filter to mitigate their individual disadvantages and obtain more accurate angle measurements.
Outlines

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنMindmap

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنKeywords

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنHighlights

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنTranscripts

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنتصفح المزيد من مقاطع الفيديو ذات الصلة
4 | How to use the MPU6050 with Arduino and Teensy

5 | How to calibrate the MPU6050 with Arduino and Teensy
Mind Controlled Drone - Tutorial

Drones | The complete flight dynamics

Drone Control and the Complementary Filter
Buat Sensor Pengukur detak Jantung || Heart Rate Sensor Arduino || Pulse sensor [#Tutorial12]
5.0 / 5 (0 votes)
