6.11 Implementing the Kalman filter for LGSSMs
Please replace the link and try again.
Outlines

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنMindmap

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنKeywords

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنHighlights

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنTranscripts

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنتصفح المزيد من مقاطع الفيديو ذات الصلة

Special Topics - The Kalman Filter (3 of 55) The Kalman Gain: A Closer Look
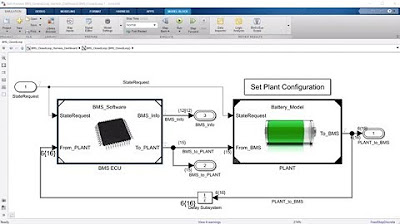
Battery Management System Development in Simulink
Extended Kalman Filter - Sensor Fusion #3 - Phil's Lab #37

Understanding Sensor Fusion and Tracking, Part 3: Fusing a GPS and IMU to Estimate Pose

Dynamic Positioning for Dummies - Kalman Filter & Error Computation (4)

Dynamic Positioning for Dummies - Overview (1)

14 | Measure angles with the MPU6050 accelerometer
5.0 / 5 (0 votes)