Control Systems Lectures - Time and Frequency Domain
Summary
TLDRThis lecture introduces the concepts of time domain and frequency domain, emphasizing their physical meaning and applications. It begins with familiar time-related equations, like distance as a function of velocity and time. The lecture then explores harmonic oscillators, showing how sinusoidal motion can be described in the time domain and its corresponding frequency domain representation. Key topics include Fourier series and transform, which convert time domain signals into frequency domain representations, and Laplace transforms, used for analyzing systems with exponential growth or decay, helping solve differential equations in physics and control system design.
Takeaways
- 😀 Time domain equations are intuitive because they reflect familiar concepts like time, velocity, and acceleration.
- 📈 Distance is a function of time and velocity, easily visualized through equations like D = V × T.
- 🌀 A harmonic oscillator follows a sinusoidal motion that can be represented mathematically, and its force is negatively proportional to the distance from the neutral point.
- ⚖️ Newton's second law is used to describe the motion of a mass attached to a spring, leading to a sinusoidal solution in the time domain.
- 🎶 Fourier series allows for the transformation of a repeating time-domain signal into the frequency domain, expressed as an infinite summation of sinusoids.
- 🎸 Combining sinusoids of different frequencies creates complex time-domain signals that can be plotted in the frequency domain.
- 🔄 The Fourier transform extends the Fourier series to non-repeating signals, representing any signal as a summation of sinusoids with frequency, amplitude, and phase.
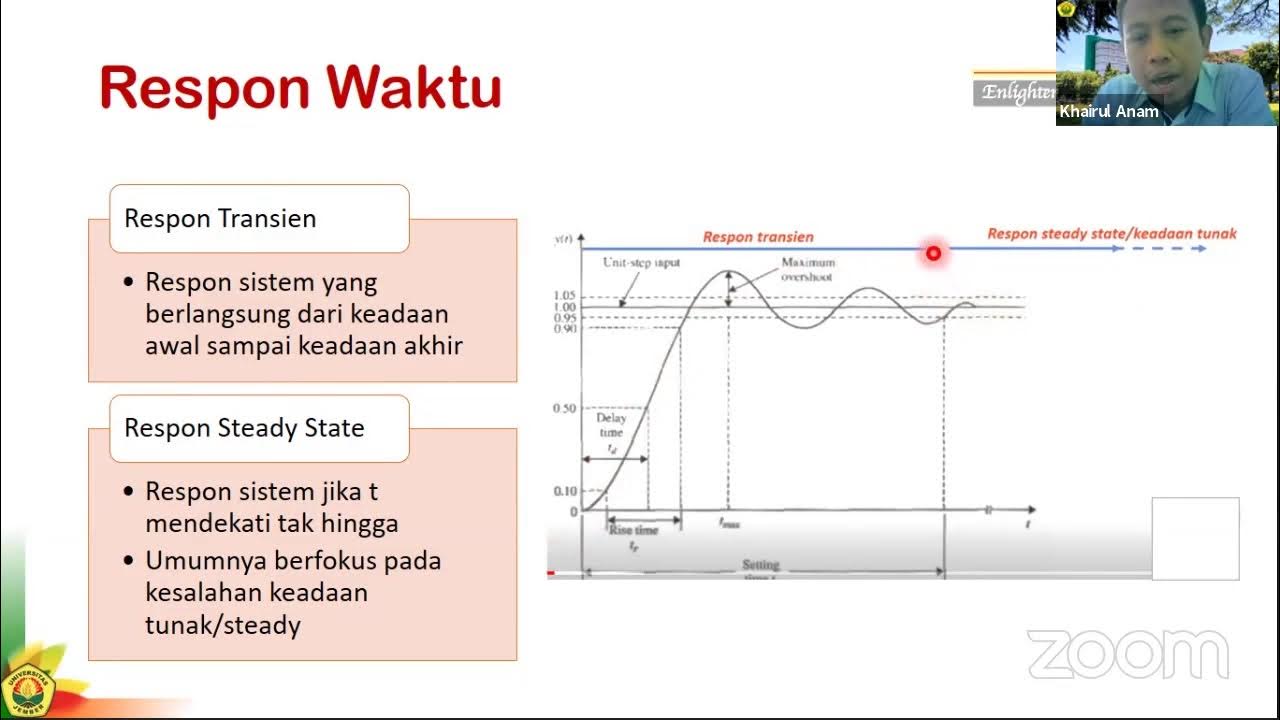
- 📉 Adding damping to an oscillator introduces an exponential decay term, which adjusts the time-domain response.
- 🧮 The Laplace transform extends the Fourier transform by accounting for exponential growth and decay, transforming signals into the S-domain for easier differential equation solving.
- 🔧 The S-domain is useful for control system design, offering insights into stability margins and simplifying complex time-domain calculations.
Q & A
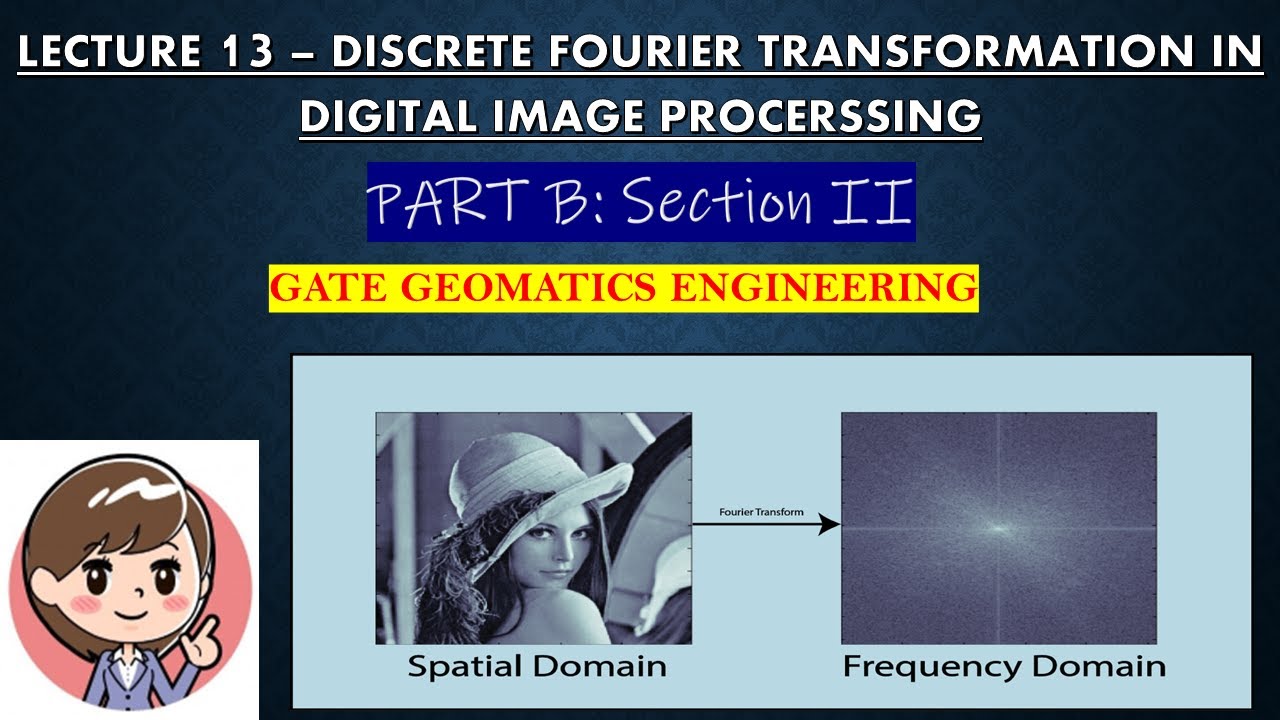
What is the difference between time domain and frequency domain?
-The time domain represents how a signal or physical quantity changes over time, while the frequency domain represents the signal's composition in terms of its frequencies. Time domain equations are often intuitive as they relate to physical concepts like velocity and distance, while the frequency domain helps in analyzing the periodic or harmonic components of a signal.
What is a harmonic oscillator, and how is it described in the time domain?
-A harmonic oscillator is a system where the restoring force is proportional to the displacement, such as a spring with a mass attached. In the time domain, its motion can be described by a sinusoidal function representing how the displacement varies over time.
How does Newton's second law apply to the harmonic oscillator?
-In the harmonic oscillator, Newton's second law states that the force acting on the mass is equal to its mass times acceleration (F = ma). The restoring force is proportional to the displacement (F = -kx), leading to a differential equation that describes the sinusoidal motion of the system.
What is the purpose of the Fourier transform in signal analysis?
-The Fourier transform is used to represent a time-domain signal in the frequency domain. It expresses the signal as a sum of sinusoids at different frequencies, amplitudes, and phases, providing insight into the signal's frequency content.
What is the difference between a Fourier series and a Fourier transform?
-A Fourier series represents a periodic time-domain signal as a sum of sinusoids at discrete harmonic frequencies. In contrast, the Fourier transform generalizes this concept to non-periodic signals, representing them as a continuous spectrum of frequencies.
How does damping affect the motion of a harmonic oscillator, and how is it represented mathematically?
-Damping causes the amplitude of the harmonic oscillator's motion to decrease over time due to energy loss, usually to friction or resistance. Mathematically, this is represented by an exponential decay term in the time domain, modifying the simple sinusoidal motion.
Why is phase important in the frequency domain representation of a signal?
-Phase determines the position of the sinusoidal components relative to each other in time. In control systems, phase is crucial because it can affect system stability and performance, even when the amplitude and frequency content are known.
What is the significance of Joseph Fourier's work in signal processing?
-Joseph Fourier showed that any periodic time-domain signal can be represented as a sum of sinusoids at different frequencies. This principle forms the basis of the Fourier series and Fourier transform, which are essential tools for analyzing signals in the frequency domain.
What is the purpose of the Laplace transform, and how does it differ from the Fourier transform?
-The Laplace transform is used to analyze systems that exhibit exponential growth or decay in addition to sinusoidal behavior. It extends the Fourier transform by including a real component (σ), which captures exponential behavior, making it useful for solving differential equations in control systems and other physical applications.
How is stability margin quantified in control system design using the S-plane?
-Stability margin in control systems is quantified using the S-plane, where the system's poles and zeros are mapped. The distance of the poles from the imaginary axis indicates the stability of the system. Systems with poles closer to the left half of the S-plane are more stable.
Outlines

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنMindmap

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنKeywords

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنHighlights

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنTranscripts

هذا القسم متوفر فقط للمشتركين. يرجى الترقية للوصول إلى هذه الميزة.
قم بالترقية الآنتصفح المزيد من مقاطع الفيديو ذات الصلة

Introduction to Fourier Transform CTFT/FT (Continuous Time Fourier Transform)

58. Konsep Transformasi Fourier
LECTURE 13 - FOURIER TRANSFORMATION IN DIGITAL IMAGE PROCESSING | GATE GEOMATICS ENGINEERING | #gate
Sistem Kontrol #3a: Analisis Repon Sistem - Pendahuluan

Metode Elektromagnetik (geofisika) bagian 1

COS 333: Chapter 1, Part 1
5.0 / 5 (0 votes)
