Simulink Control Systems and PID, Matlab R2020b
Summary
TLDRIn this tutorial, Nikolai Coomer guides users through the process of building and simulating a PID controller using Simulink. The video covers the basics of creating a model in Simulink, adding a transfer function, and constructing an open-loop system. It then moves to closed-loop systems with feedback, explaining proportional, integral, and derivative gains in the context of PID control. The tutorial concludes with tips on tuning the controller and using Simulink's built-in PID blocks for more efficient simulation. This practical guide helps users understand PID control and its implementation in system modeling.
Takeaways
- 😀 Simulink is a programming environment within MATLAB used for modeling, simulating, and analyzing systems.
- 😀 A PID controller can be implemented in Simulink by creating a model with blocks representing the system and controller components.
- 😀 The transfer function in Simulink is defined by its numerator and denominator coefficients, which can represent real-world systems like DC motors.
- 😀 Feedback loops in control systems are crucial, and they can be configured in Simulink using summation junction blocks to achieve negative feedback.
- 😀 Proportional control (P) can be tested in Simulink by adjusting the gain and observing system behavior, including overshoot and steady-state error.
- 😀 Integral control (I) eliminates steady-state error, particularly in systems with friction, and can be added by incorporating an integrator block.
- 😀 Derivative control (D) reduces overshoot and can be added to the system to fine-tune the controller's performance.
- 😀 A saturation block is essential for preventing the controller from commanding unrealistic input values, ensuring the system stays within physical limits.
- 😀 Simulink provides a built-in PID controller that can be customized, and its performance can be compared to a manually implemented PID controller.
- 😀 Tuning a PID controller in Simulink requires adjusting the proportional (Kp), integral (Ki), and derivative (Kd) gains, and testing for system stability and performance.
Q & A
What is Simulink and how does it integrate with MATLAB?
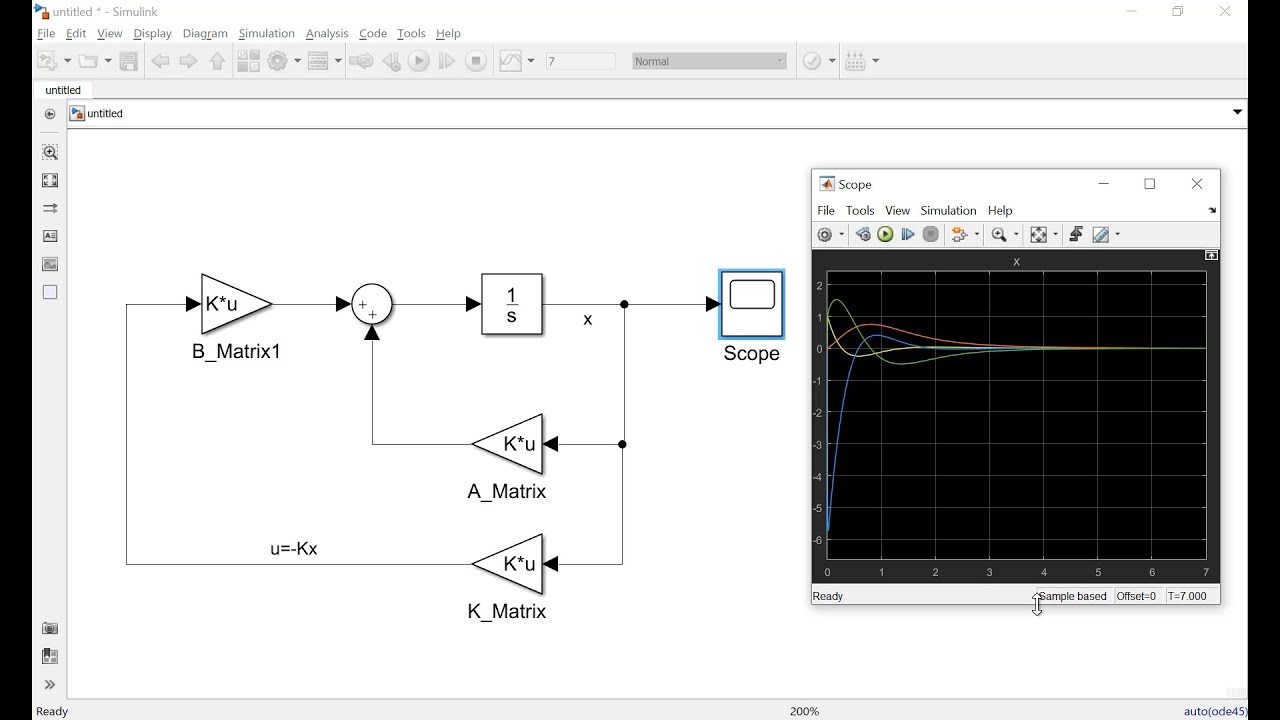
-Simulink is a graphical programming environment within MATLAB that allows users to model, simulate, and analyze dynamic systems. It uses function blocks to represent mathematical operations, making it easier to design and test systems visually.
How do you start a new model in Simulink?
-To start a new model in Simulink, you can either click the 'Simulink' button in the MATLAB Home tab or type 'simulink' in the MATLAB command window and press enter. From there, you can create a new model by selecting 'Create Model' from the Simulink start page.
What is the purpose of the transfer function in Simulink?
-The transfer function in Simulink represents the mathematical model of a dynamic system. It defines the relationship between the input and output of the system in terms of Laplace transform variables. This is essential for simulating how a system responds to different inputs.
What role does the Scope block play in a Simulink model?
-The Scope block in Simulink is used to visualize signals in the system. It displays the time-domain behavior of the system’s output, which helps in analyzing the system’s performance during simulation.
What is the significance of renaming blocks and signals in a Simulink model?
-Renaming blocks and signals helps to maintain clarity and organization in the model. It makes it easier to track and understand the function of each component, especially in more complex systems like PID controllers.
How does feedback work in the context of the Simulink model?
-Feedback in a Simulink model is used to compare the output of a system with the desired input and adjust the input accordingly. In the video, negative feedback is implemented using a summation junction, which subtracts the output from the input to generate the error signal.
What does the 'unity gain' feedback loop refer to?
-A unity gain feedback loop refers to a feedback configuration where the gain is set to 1. This means that the output is directly compared to the input with no scaling factor applied to the feedback signal.
Why is it important to include a saturation block in a Simulink model?
-A saturation block is important because it ensures that the control inputs stay within realistic bounds. For example, a motor has a maximum voltage it can accept, and the saturation block prevents the simulation from producing unrealistic, infinite control inputs that could cause numerical errors.
What is the purpose of the PID controller in Simulink?
-The PID controller in Simulink is used to regulate system output by adjusting the input based on three control components: proportional (P), integral (I), and derivative (D) gains. The PID controller minimizes the error between the desired and actual outputs by adjusting the input dynamically.
How can the integral and derivative terms in a PID controller help improve system performance?
-The integral term helps eliminate steady-state error by accumulating the error over time, while the derivative term anticipates the system's behavior by reacting to the rate of change in the error. Together, these terms improve system accuracy and response time, particularly in systems with friction or oscillations.
Outlines

此内容仅限付费用户访问。 请升级后访问。
立即升级Mindmap

此内容仅限付费用户访问。 请升级后访问。
立即升级Keywords

此内容仅限付费用户访问。 请升级后访问。
立即升级Highlights

此内容仅限付费用户访问。 请升级后访问。
立即升级Transcripts

此内容仅限付费用户访问。 请升级后访问。
立即升级浏览更多相关视频

Tuning PID di Simulink

How To Implement Fuzzy Logic Control in MATLAB/SIMULINK ? (Part-3) | Dr. J. A. Laghari
How to Program a Basic PID Loop in ControlLogix
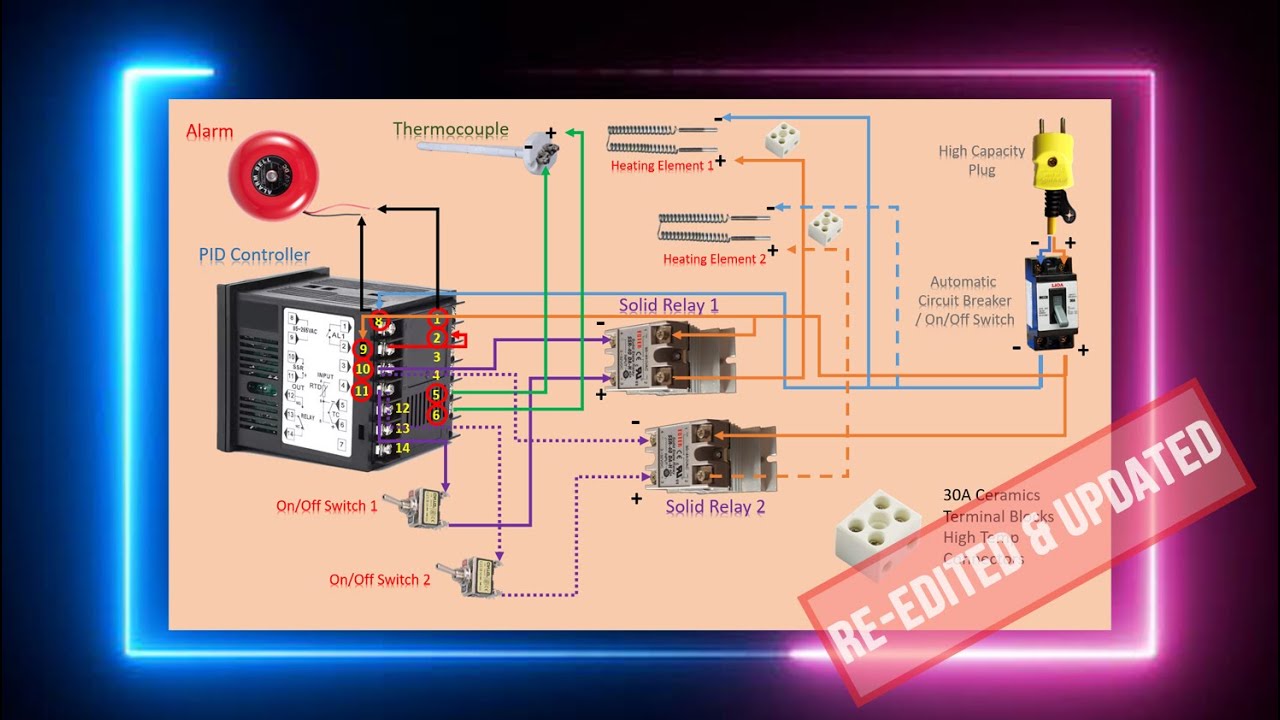
HOW TO WIRE PID FOR SINGLE OR MULTIPLE HEATING ELEMENTS | RE-EDITED & UPDATED

How To Design Automatic Voltage Regulator (AVR) Model of Power System in MATLAB/SIMULINK Software ?
How to Make Simulation of Inverted Pendulum (Balancing Robot) Control in Simulink Matlab
5.0 / 5 (0 votes)
