RC Basics - Understanding Electronic Speed Controllers (ESC)
Summary
TLDRIn this video, we explore electronic speed controllers (ESCs), explaining their function in running motors and supplying voltage to flight controllers and other electronics. Key topics include how ESCs work, their three-wire connections, motor control, firmware options (Simon K, BL Heli), and calibration. We also cover brake, throttle response, timing, and battery eliminator circuits (BECs). This video aims to demystify ESCs and provide enough context for viewers to further their research. It's a comprehensive guide for enthusiasts looking to understand and optimize their models' performance.
Takeaways
- 😀 Electronic Speed Controllers (ESCs) are essential for running motors and supplying power to flight controllers and other electronics.
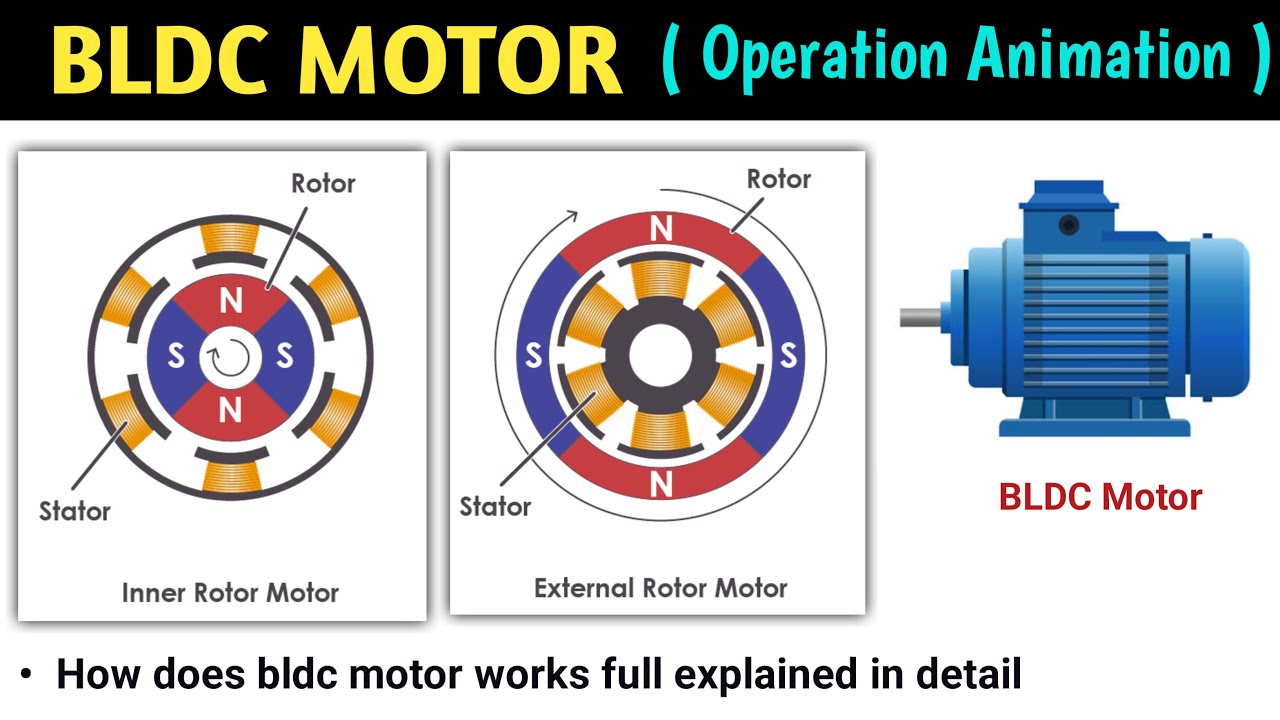
- 🔧 ESCs have three wires because they control three-phase brushless motors, which require a specific sequence of power to function correctly.
- 📡 ESCs can be set up with various configurations, including brake, throttle response, and timing, which can affect motor performance.
- 🛠 Firmware versions like SimonK and BLHeli are specialized for multirotors, offering faster response times and better motor control.
- 🔄 Swapping any two of the three motor wires can reverse the motor's direction, which is a quick fix if the motor is spinning the wrong way.
- 🚫 Traditional ESC settings like 'brake' and 'low voltage alarm' may not be suitable for all applications, such as multirotors.
- 🔄 ESCs with a bootloader make it easier to change firmware, allowing for customization of motor control characteristics.
- 📶 One-shot ESCs offer an 8-megahertz update speed for motor control, providing faster and more instant response times than traditional 1-megahertz signals.
- 🔄 Throttle calibration is crucial for ensuring that the ESC understands the throttle range of the radio or flight controller, preventing motor misbehavior.
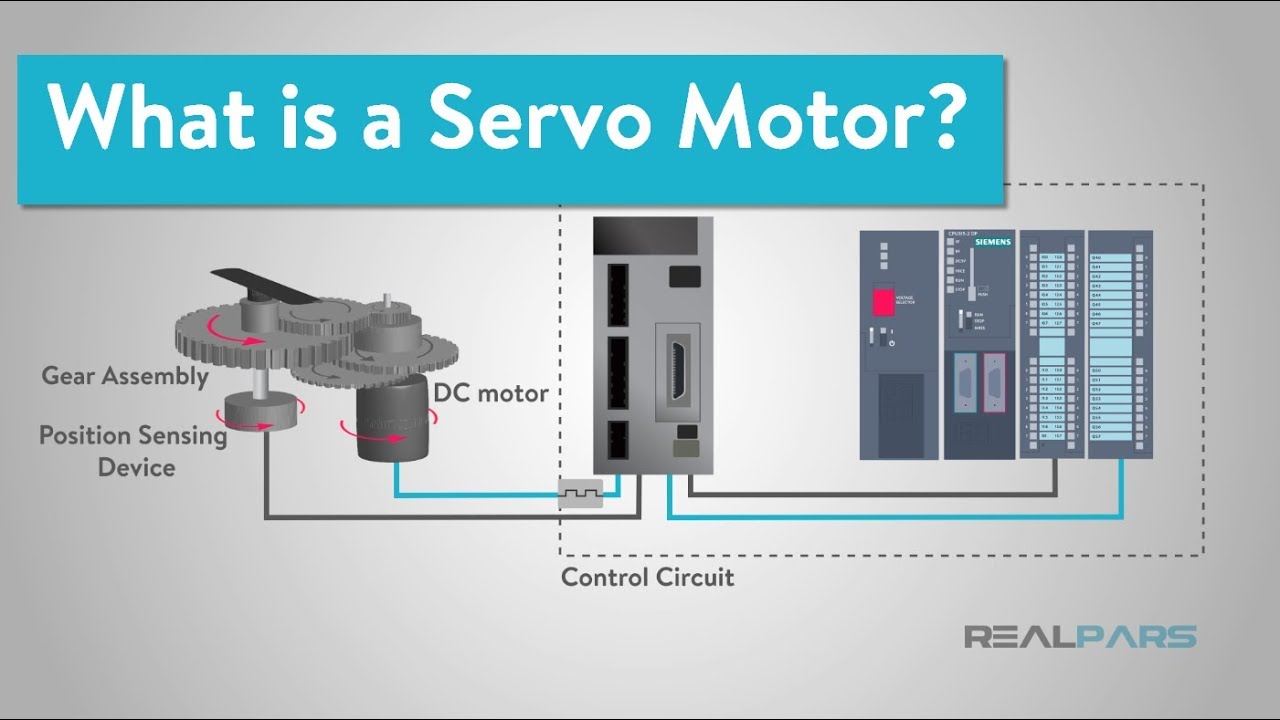
- 🔌 Battery Eliminator Circuits (BECs) provide +5 volts to the flight controller and servos, with different types like linear, switched, and Optio offering varying levels of efficiency and functionality.
- ⚠️ High-power ESCs may not include a BEC, requiring a separate power source for the flight controller and other electronics.
Q & A
What are the two basic functions of an Electronic Speed Controller (ESC)?
-The two basic functions of an ESC are to run a motor and, in many cases, to supply the +5 volts needed for flight controllers, servos, and other electronics in the craft to operate.
Why are there three wires coming out of an ESC instead of the usual two (black and red)?
-There are three wires because the ESC is connected to a three-phase brushless motor, with each wire connecting to one of the three phases of the motor.
How does an ESC control the speed of a motor?
-An ESC controls the speed of a motor by firing pairs of wires connected to electromagnets in the motor in rapid succession, which in turn rotates the motor's rotor. The ESC also listens to feedback from the motor to know where to fire the next electromagnet.
What is the purpose of the signal wire in an ESC setup?
-The signal wire in an ESC setup carries the signal from the transmitter or flight controller that tells the ESC how much power to allow through to the motor, effectively controlling the motor's speed.
What are some of the traditional settings found on ESCs?
-Traditional settings on ESCs include brake, soft start, motor direction, low voltage alarm, response time, and advanced settings that affect how the ESC responds to throttle inputs.
What is the difference between SimonK and BLHeli firmware for ESCs?
-SimonK firmware is one of the first variants specifically written for multirotors, offering faster throttle response and being set up for a multicopter. BLHeli, a newer firmware, offers all the benefits of SimonK but also allows for more detailed settings adjustments through a PC connection using the BL suite of software.
What is the purpose of throttle calibration for ESCs?
-Throttle calibration ensures that the throttle range on the ESC matches the throttle range on the radio or flight controller, ensuring that the motor speed changes are accurate and consistent with the pilot's input.
What is a Battery Eliminator Circuit (BEC) and why is it important?
-A Battery Eliminator Circuit (BEC) is a part of the ESC that provides the +5 volts needed for the flight controller, servos, and other electronics in the craft. It is important because it powers these components without drawing power directly from the main battery.
What are the different types of BECs mentioned in the script?
-The script mentions linear BECs, which are simple but inefficient and can get warm; switched BECs, which are more efficient and support larger batteries; Optio BECs, which provide optical isolation but not +5 volts; and some high-power ESCs that have no BEC at all, requiring an external source for +5 volts.
What is the concept of 'one shot' in ESCs and how does it differ from the default signal?
-One shot is a new synchronous method for updating motor speed from the flight controller. Unlike the default 1 megahertz signal using pulse width modulation, one shot operates at 8 megahertz and updates the motor speed instantly as soon as the flight controller signals a change, making it faster and more responsive.
Outlines

此内容仅限付费用户访问。 请升级后访问。
立即升级Mindmap

此内容仅限付费用户访问。 请升级后访问。
立即升级Keywords

此内容仅限付费用户访问。 请升级后访问。
立即升级Highlights

此内容仅限付费用户访问。 请升级后访问。
立即升级Transcripts

此内容仅限付费用户访问。 请升级后访问。
立即升级



5.0 / 5 (0 votes)
