Explicacion del proyecto
Summary
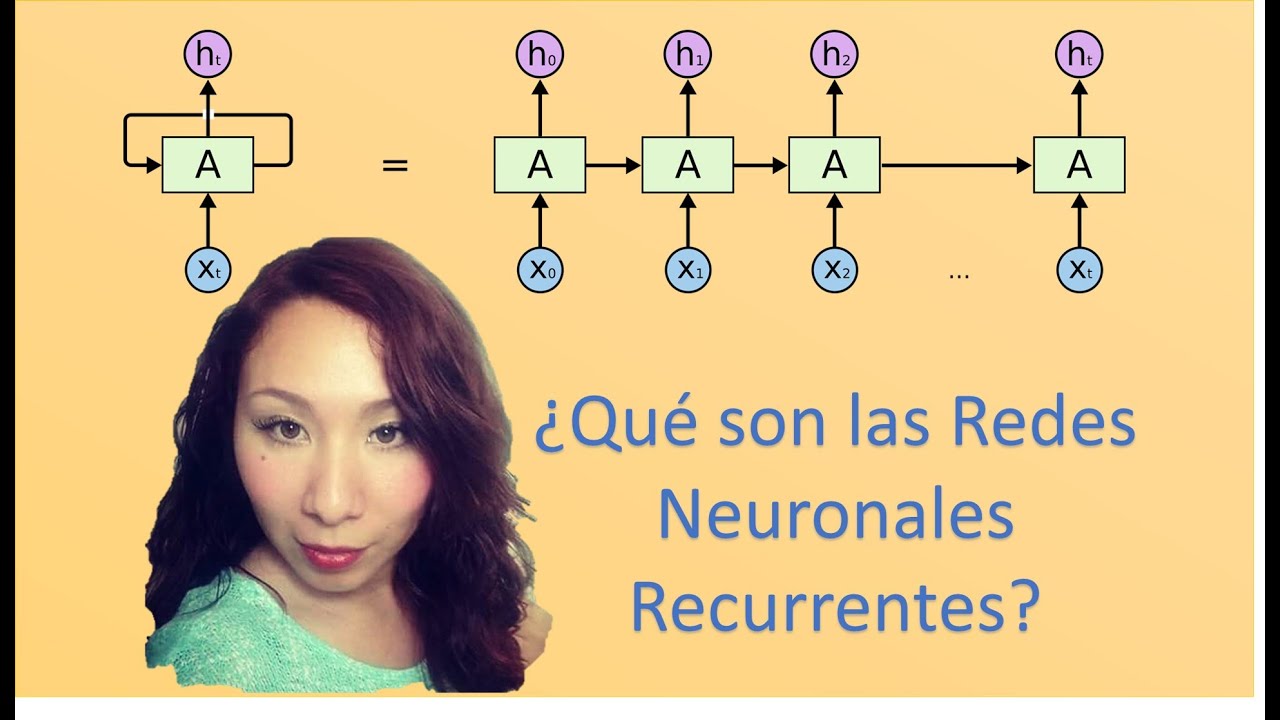
TLDREste proyecto utiliza inteligencia artificial y redes neuronales para la separación automática de residuos en entornos urbanos. A través de la visión computacional y el modelo YOLO de detección de objetos, el sistema clasifica el plástico, vidrio, metal, cartón y residuos médicos en tiempo real. La interfaz gráfica permite visualizar el tipo de residuo y la información sobre el contenedor adecuado para su disposición. Aunque hay desafíos con la precisión debido a la cámara y las condiciones de luz, el sistema logra distinguir eficazmente los diferentes tipos de basura, promoviendo prácticas sostenibles en la gestión de residuos.
Takeaways
- 😀 El objetivo principal del proyecto es la separación de residuos mediante inteligencia artificial y visión computacional.
- 😀 La IA es capaz de identificar y clasificar automáticamente diferentes tipos de basura, como metal, vidrio, plástico, cartón y desechos médicos.
- 😀 El proyecto busca mejorar la eficiencia en la gestión de residuos y fomentar prácticas sostenibles en entornos urbanos.
- 😀 El código utilizado en el proyecto emplea librerías para procesamiento de imágenes, detección de objetos con YOLO y manipulación de matrices.
- 😀 La limpieza de etiquetas es una de las primeras etapas del código, preparando las imágenes para la interfaz y la detección.
- 😀 El sistema clasifica los residuos en categorías específicas: metal, vidrio, plástico, cartón y residuos médicos.
- 😀 Se utiliza YOLO para la detección de objetos, mostrando cuadros alrededor de los residuos y su clasificación correspondiente en la interfaz.
- 😀 El sistema muestra en la interfaz gráfica el tipo de residuo detectado, con colores específicos para cada tipo (por ejemplo, azul para plástico).
- 😀 El proyecto incluye una interfaz gráfica con cámara, clasificación de residuos y detalles informativos sobre cada tipo de material.
- 😀 Se presenta un modelo entrenado con rutas de archivo personalizadas, y la cámara se inicia automáticamente para realizar la detección en tiempo real.
- 😀 El sistema de clasificación tiene algunos desafíos, como el fallo ocasional debido a la calidad de la cámara o la iluminación, pero en general detecta correctamente los residuos.
Q & A
¿Cuál es el objetivo principal del proyecto descrito en el guion?
-El objetivo principal del proyecto es la separación de residuos utilizando inteligencia artificial, específicamente mediante visión computacional para identificar y clasificar automáticamente los diferentes tipos de basura.
¿Qué tecnologías se utilizan en el proyecto para la clasificación de residuos?
-El proyecto utiliza tecnologías como la visión computacional, el modelo YOLO para detección de objetos, y diversas librerías para procesamiento de imágenes y manejo de matrices.
¿Qué tipos de residuos se clasifican en el proyecto?
-Los tipos de residuos clasificados en el proyecto son metal, vidrio, plástico, cartón y desechos médicos.
¿Qué rol juegan las librerías mencionadas en el código del proyecto?
-Las librerías mencionadas en el código, como OpenCV y YOLO, son fundamentales para el procesamiento de imágenes, la detección de objetos, y la manipulación de matrices que permiten identificar y clasificar los residuos correctamente.
¿Cómo se realiza la detección y clasificación de residuos en la interfaz?
-La detección y clasificación se realiza mediante la cámara del dispositivo, que captura los frames que son procesados por el modelo YOLO, el cual genera coordenadas y marcas visuales en las imágenes para indicar el tipo de residuo.
¿Qué pasa si no se detecta ningún objeto en la cámara?
-Si no se detecta ningún objeto, la interfaz muestra un mensaje indicando que no se ha identificado nada y la detección de residuos no ocurre.
¿Cómo se muestra la información de clasificación al usuario?
-La información de clasificación se muestra a través de la interfaz gráfica, donde se indica en qué contenedor debe colocarse cada residuo y se proporciona una pequeña descripción del tipo de residuo.
¿Qué problemas pueden afectar la precisión de la detección en el proyecto?
-La precisión de la detección puede verse afectada por factores como problemas con la cámara, como bloqueos o fallos en la conexión, o condiciones de iluminación deficientes, que pueden interferir con la correcta identificación de los objetos.
¿Cómo se organiza la interfaz gráfica del proyecto?
-La interfaz gráfica tiene varias secciones: una ventana central que muestra la cámara en tiempo real, una sección de clasificación que indica a qué contenedor pertenece cada objeto, y una parte informativa que describe brevemente los tipos de residuos.
¿Qué información se muestra en el área de 'información' de la interfaz?
-En el área de 'información', se proporciona una breve descripción del tipo de residuo que se está detectando, como plástico, cartón, vidrio, etc., y algunos consejos sobre la gestión de residuos.
Outlines

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowMindmap

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowKeywords

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowHighlights

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowTranscripts

This section is available to paid users only. Please upgrade to access this part.
Upgrade NowBrowse More Related Video




5.0 / 5 (0 votes)
